Sistema de coordenadas y de herramienta
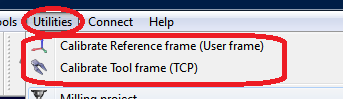
RoboDK proporciona algunas utilidades para calibrar los sistemas de coordenadas y sistemas de herramientas. Estas herramientas pueden ser accedidas desde Utilidades➔Calibrar Sistema Coordenado y Utilidades➔Calibrar Sistema de Herramienta TCP respectivamente.
Para calibrar un sistema de coordenadas o un sistema de herramienta (también conocido como sistema de Usuario y TCP, respectivamente) necesitamos algunas configuraciones del robot tocando 3 o más puntos, estas configuraciones de robot pueden ser valores de articulación o coordenadas cartesianas (con datos de orientación en algunos casos). Se recomienda utilizar los valores de articulación en lugar de las coordenadas cartesianas, ya que es más fácil de comprobar la configuración de robot real en RoboDK (copiando y pegando las articulaciones del robot a la pantalla principal de RoboDK).
Herramienta de calibración
Seleccione Utilidades➔Calibrar Sistema de Herramienta para calibrar el TCP usando RoboDK. Podemos utilizar tantos puntos como se desee, utilizando diferentes orientaciones. Más puntos y cambios de orientación más grandes son mejores, ya que vamos a obtener una mejor estimación del TCP, así como una buena estimación del error de TCP.
Las siguientes dos opciones están disponibles para calibrar un TCP:
●Tocando un punto estacionario con el TCP con diferentes orientaciones.
●Tocando un plano con el TCP (como una sonda de contacto
Se recomienda calibrar tocando un plano de referencia si tenemos que calibrar una sonda de contacto o un husillo. Este método es más estable frente a errores del usuario.
Si el TCP es esférico, el centro de la esfera se calcula como la nueva TCP (no es necesario proporcionar el diámetro de la esfera).
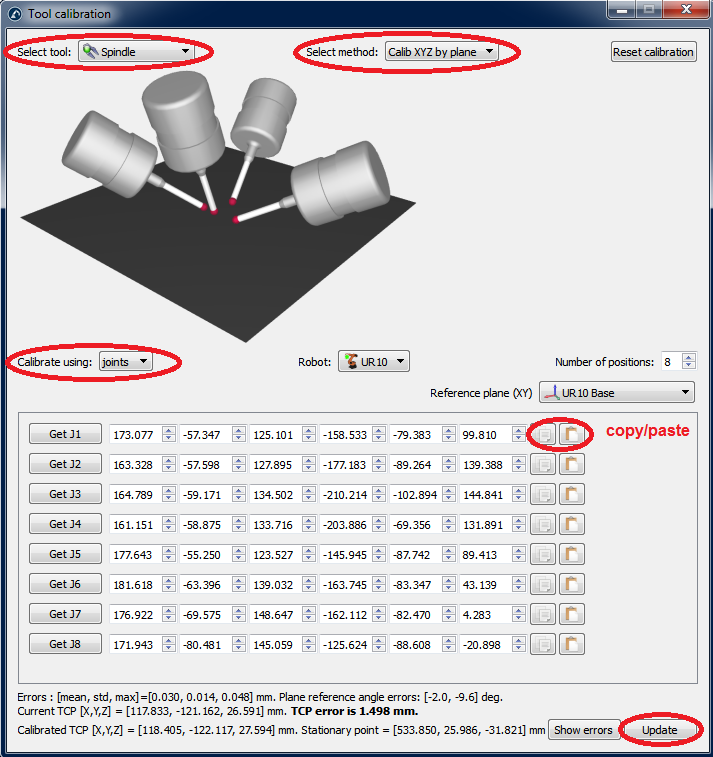
Los siguientes pasos se deben seguir para calibrar el TCP con un plano (como se ve en la imagen):
1.Seleccione la herramienta que necesita ser calibrada.
2.Seleccione el método de calibración➔“Calib XYZ por plano”.
3.Seleccione la calibración usando “articulaciones”.
4.Seleccione el robot que se está utilizando.
5.Seleccione el número de configuraciones que vamos a usar para la calibración del TCP (se recomienda tomar 8 o más configuraciones).
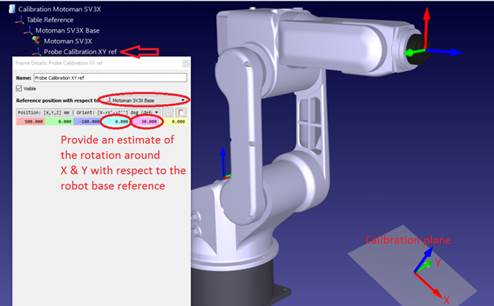
6.Seleccionar una estimación del plano de referencia. Si el plano de referencia no es paralelo al plano XY del robot (desde la referencia de robot) se debe añadir una estimación de este plano de referencia dentro de ± 20 grados. La posición de este plano no es importante, sólo la orientación.
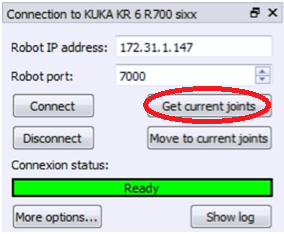
7.Podemos empezar a llenar la tabla de valores de articulación. Podemos llenarla manualmente o copiando/pegando con los botones (como se muestra en la imagen). También podemos utilizar el botón “Obtener Jx” para obtener los valores actuales de las articulaciones del robot en el simulador. Si estamos obteniendo las articulaciones de un robot real conectado al robot en primer lugar debemos seleccionar “Obtener articulaciones actuales” en el menú de conexión del robot (ver imagen adjuntada o en el apéndice para obtener más información sobre la conexión de un robot con RoboDK). Se recomienda encarecidamente mantener una copia separada de las articulaciones utilizadas para la calibración (por ejemplo, un archivo de texto).
8.Una vez que se llena la tabla veremos los nuevos valores de TCP (X, Y, Z) como el “TCP Calibrado”, hacia el final de la ventana. Podemos seleccionar “Actualizar” y el nuevo TCP se actualizará en la estación RoboDK. La orientación de la sonda no se puede encontrar utilizando este método.
9.Podemos seleccionar “Mostrar errores” y vamos a ver el error de cada configuración con respecto al TCP calculado (que es el promedio de todas las configuraciones). Podemos eliminar una configuración si tiene un error más grande que los otros.
10.Debemos actualizar manualmente los valores en el controlador de robot real (X, Y, Z solamente). Si es utilizado este TCP en un programa generado por RoboDK, no es necesario actualizar los valores en el controlador del robot.
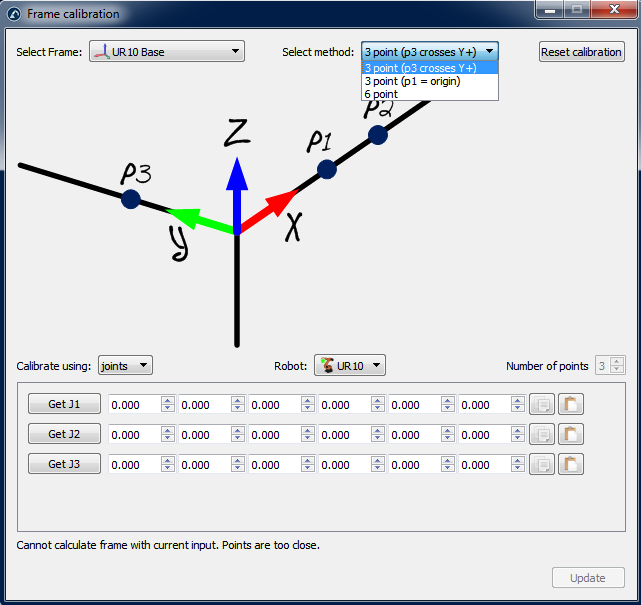
Calibración del sistema de coordenadas
Seleccione Utilidades➔Calibrar Sistema de Coordenadas para calibrar un sistema de coordenadas. Es posible establecer un sistema de coordenadas utilizando diferentes métodos. En el ejemplo de la figura, un sistema de coordenadas está definido por tres puntos: el punto 1 y 2 definen la dirección del eje X y el punto 3 define el eje Y positivo.