Cómo usar los Controladores del Robot
Siga estos pasos para utilizar los controladores del robot en RoboDK:
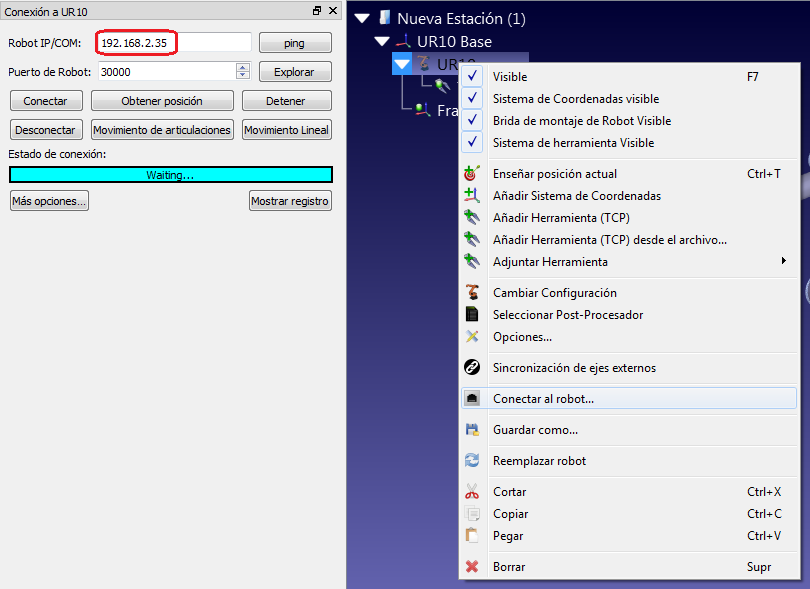
1.Haga clic derecho en un robot
2.Seleccione 
3.Introduzca la dirección IP del robot
4.Seleccione Conectar
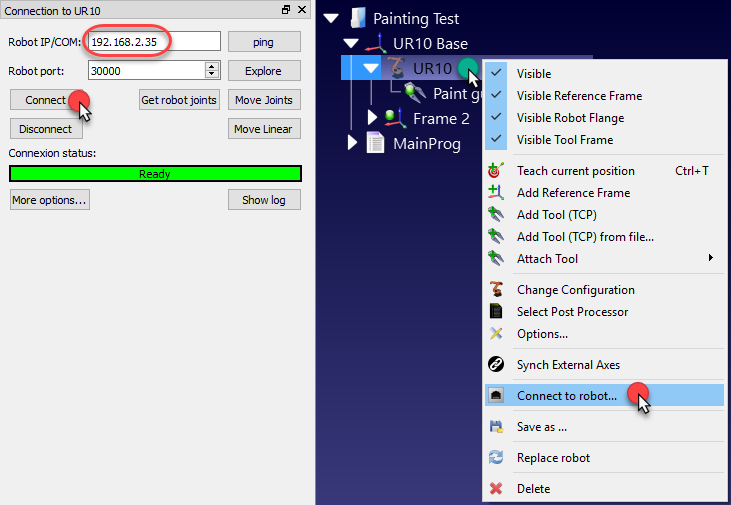
Un mensaje verde que muestra Listo aparecerá si la conexión se ha realizado correctamente, como se muestra en la siguiente imagen.
Usando el GUI
Un programa de robot que se ha creado mediante la interfaz gráfica de usuario (GUI) puede ser ejecutado en el robot siguiendo estos pasos:
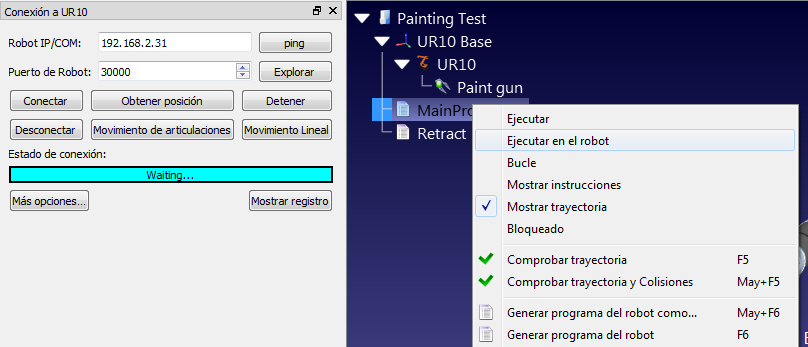
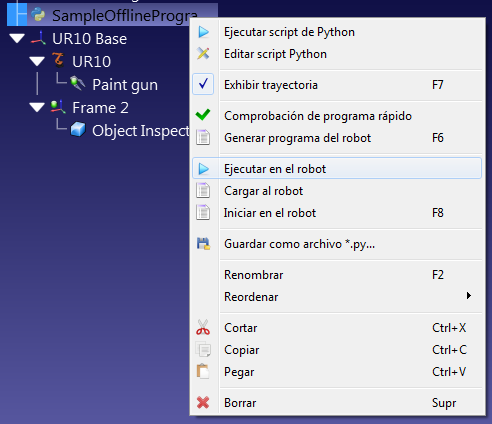
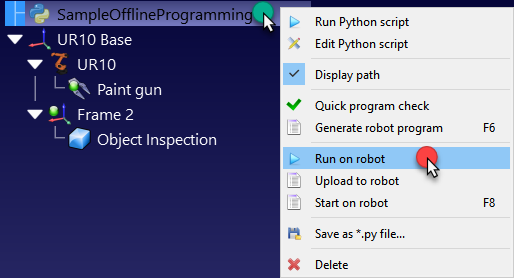
1.Haga clic derecho en un programa 
2.Compruebe la opción Ejecutar en robot
3.Haga doble clic en el programa para iniciarlo
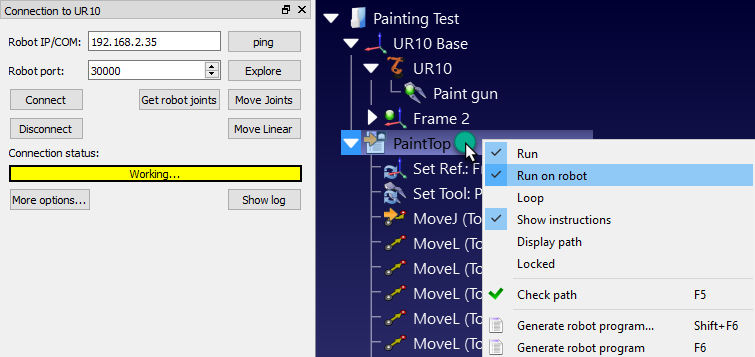
El programa debe comenzar en el robot real y el simulador seguirá los movimientos del robot. El estado de la conexión mostrará Trabajando... en amarillo cuando el robot esté ocupado.
Usando el API
Es posible controlar el movimiento de un robot desde RoboDK API, Por ejemplo, para programar un robot desde un programa Python o una aplicación de C #.
La ejecución de la opción del robot se realiza de forma automática cuando un programa se ejecuta desde Python RoboDK. Siga estos pasos para ejecutar un programa de Python en el robot:
1.Haga clic derecho en un programa 
2.Seleccione 
El programa debe comenzar a ejecutarse en el robot y el estado de conexión del robot será actualizado en consecuencia.
Si el programa se ejecuta fuera de la interfaz gráfica de usuario de RoboDK (para fines de depuración, o si estamos utilizando la API RoboDK para C#, por ejemplo), podemos establecer el uso de RunModeRDK.setRunMode para RUNMODE_RUN_ROBOT. Esto forzará a que el programa se ejecute en el robot. También es posible establecer la conexión utilizando robot.Connect().
El siguiente código muestra un breve ejemplo para establecer una conexión con el robot directamente desde la API:
# Start the RoboDK API
RDK = Robolink()
robot = RDK.Item('',ITEM_TYPE_ROBOT)
# Connect to the robot using default connetion parameters
success = robot.Connect()
status, status_msg = robot.ConnectedState()
if status != ROBOTCOM_READY:
# Stop if the connection did not succeed
raise Exception("Failed to connect: " + status_msg)
# Set to run the robot commands on the robot
RDK.setRunMode(RUNMODE_RUN_ROBOT)
# Note: This is set automatically if we use
# robot.Connect() through the API
# Move the robot:
robot.MoveJ([10,20,30,40,50,60])
prog = RDK.Item('MainProgram', ITEM_TYPE_PROGRAM)
prog.setRunType(PROGRAM_RUN_ON_ROBOT) # Set the run on robot option
# Set to PROGRAM_RUN_ON_SIMULATOR to run on the simulator only
prog.RunProgram()
while prog.Busy() == 1:
pause(0.1)
print("Program done")