Personalizar los Controladores del Robot
Los controladores de robot se encuentran en la carpeta /RoboDK/api/Robot/ por defecto. RoboDK vincula a un controlador específico en la configuración de conexión de robot:
1.Haga clic derecho en un robot
2.Seleccione 
3.Seleccione Más opciones...
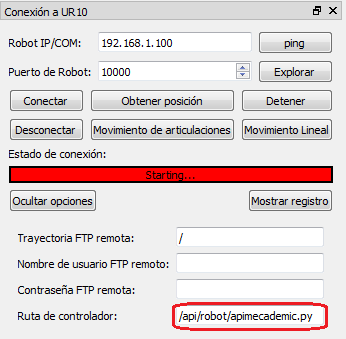
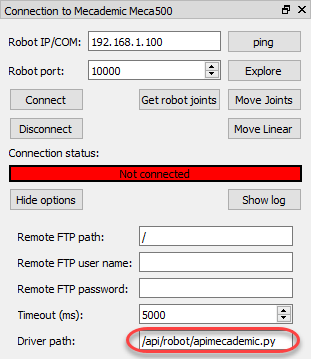
4.Localice o introduzca la trayectoria de la ruta del controlador en la sección de Ruta del controlador
Un controlador de robot es una aplicación de consola independiente. Los controladores de robot se pueden desarrollar utilizando cualquier plataforma de programación, por ejemplo, estos pueden ser un módulo de Python (formato PY) o cualquier programa ejecutable construido con cualquier IDE.
El controlador de robot permite la comunicación con un robot a través de la línea de comandos. Los mismos comandos que se pueden ejecutar manualmente también son utilizados por RoboDK para conducir el robot desde el PC. Cada controlador de robot se puede ejecutar en modo consola para probarlo.
Un controlador de ejemplo Python (apimecademic.py) con su código fuente para el control de robots Mecademic está disponible en C:/RoboDK/bin/robot/.
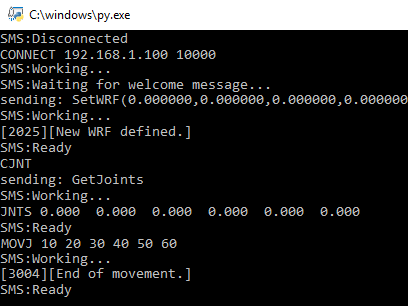
Haga doble clic en el archivo apimecademic.py para ejecutar el módulo en modo consola (Python debe estar instalado). El controlador esperará nuevas órdenes. Por ejemplo, podemos escribir el siguiente comando para conectar con el robot provisto de una IP y un puerto de comunicación:
CONNECT 192.168.100.1 10000
Si la conexión tiene éxito deberíamos ver un mensaje SMS:Listo. Entonces, podemos escribir el siguiente comando para recuperar las articulaciones del robot actuales:
CJNT
También podemos escribir otros comandos como MOVJ, MOVL o SETTOOL para mover el robot o actualizar el protocolo TCP:
MOVJ 10 20 30 40 50 60
Algunos robots soportan el monitoreo de la posición de la articulación en tiempo real. En este caso, es posible proporcionar retroalimentación de posición de la articulación al moverse el robot mediante el envío de la orden JNTS_MOVING. Cuando el controlador se ejecuta desde RoboDK, el robot virtual seguirá el movimiento del robot real en tiempo real. Un nuevo comando no será procesado hasta que se envíe el mensaje Preparado.
La interacción con la consola y la conexión con el robot son gestionadas por el módulo de Python para el controlador Mecademic. La interacción con la consola debe ser la mismo para todos los robots, como se describe en esta sección. Sin embargo, la interacción con cada robot depende del fabricante del robot, en este caso nos referimos al Manual de programación del Meca 500 para enviar los comandos apropiados para mover y controlar el robot Meca 500.