Solucionador de Problemas
Configurar el controlador de robot podría no ser tan simple como generar programas fuera de línea (programación fuera de línea). Si la conexión no funciona, los siguientes pasos proporcionan algunos consejos para encontrar la fuente de los problemas:
1.Asegúrese de que la IP del robot sea correcta: Seleccione el botón de ping desde el menú de conexión del robot (o ping al robot a través de la línea de comandos) Para asegurarse de que el robot y el equipo están en la misma red
2.Establezca una IP estática para el equipo si el robot y el equipo no están en la misma red
3.Asegúrese de que el corta fuegos en el computador esté apagado para evitar el bloqueo de las conexiones
4.Asegúrese de que el puerto de comunicación sea apropiado y esté disponible del lado del robot
5.Asegúrese de que las instrucciones adecuadas sean seguidas en el controlador del robot en función del modelo de controlador
6.Haga doble clic en Desconectar en la ventana de conexión del robot para obligar al controlador a detenerse, entonces, seleccione conectar de nuevo para probar una nueva conexión
Prueba Ping
Una prueba de ping pondrá a prueba la accesibilidad de un robot en una red de Protocolo de Internet (IP).
Siga estos pasos para realizar una prueba de ping en Windows:
1.Abra una nueva ventana de consola mediante la selección 
2.Escriba cmd y seleccione Aceptar
3.Escriba ping IP, (donde la IP debe ser la IP de su robot). Ejemplo:
ping 192.168.125.2
Deberíamos ver una respuesta similar a la imagen con una pérdida de señal de 0%
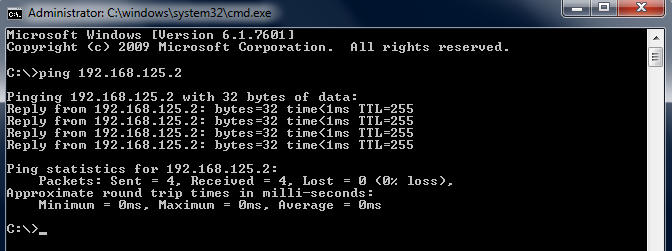
Si no hay comunicación hay que verificar que el IP del robot y el PC están en la misma red de área local (LAN). Puede ser que sea necesario desactivar el Firewall de Windows o añadir una regla para permitir la comunicación.
Establecer una IP Estática
Siga estos pasos para cambiar la IP de un computador:
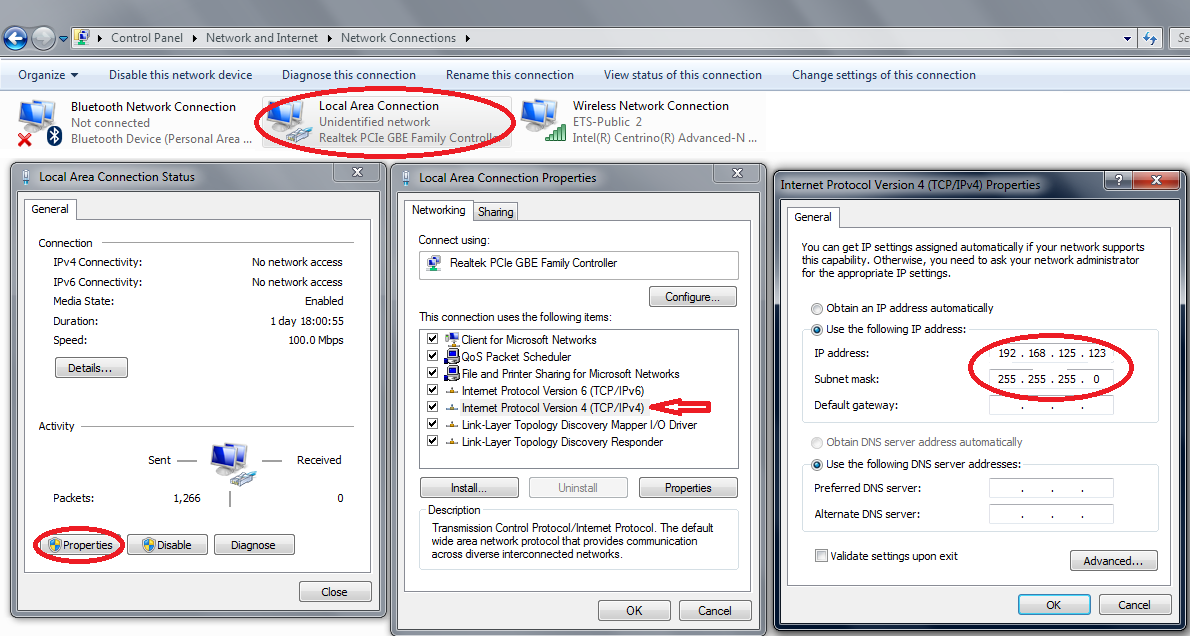
1.Seleccione Inicio de Windows➔Panel de control➔Redes e Internet➔Conexiones de red
2.Haga doble clic en la tarjeta de conexión de área local
3.Seleccione Propiedades.
4.Seleccione Protocolo de Internet versión 4 (TCP/IPv4)
5.Seleccione Propiedades
6.Introduzca la dirección IP del computador de acuerdo con el robot IP y una máscara de subred.