Agarre Robótico de Objeto
Es posible programar un robot cuando sostiene el objeto/trayectoria con la herramienta con el robot mientras se realiza la operación de manufactura. Esto es útil para los usos de dispensado de pegamento o de pulido por ejemplo.
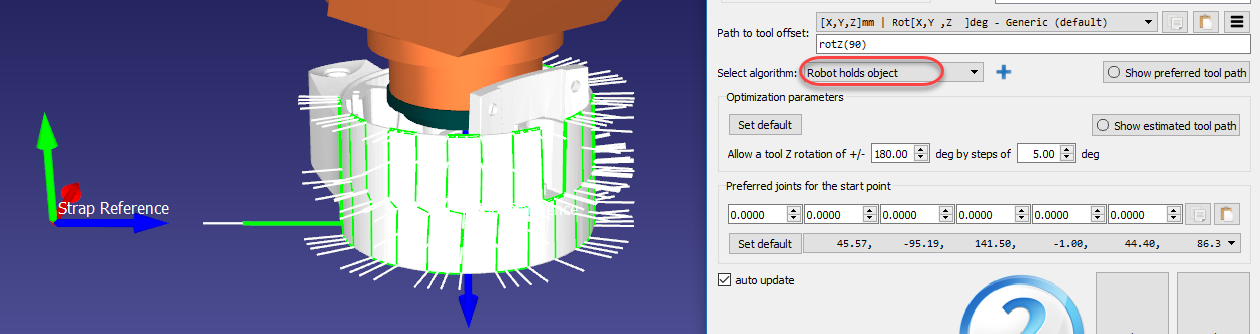
Seleccione Agarre Robótico de Objeto en el desplegable Seleccionar algoritmo para colocar correctamente la trayectoria de herramienta en la referencia TCP. Los otros ajustes son los mismos que en el Proyecto de mecanizado con una orientación constante de la herramienta.
Importante: Se recomienda encarecidamente que los puntos de la trayectoria de herramienta se acerquenn entre sí si se cambia la orientación de las herramientas.