Compensación de ruta de herramienta
La compensación de ruta de herramienta permite cambiar la orientación preferida de la herramienta a lo largo de la trayectoria. Esta opción se utiliza principalmente para girar la herramienta alrededor del eje Z del TCP.
Debido a que se usa un robot de 6 ejes para ejecutar un programa de fabricación con CNC de 3 ó 5 ejes, tenemos un grado adicional de libertad para definir. Este grado de libertad es usualmente la rotación alrededor del eje Z del TCP.
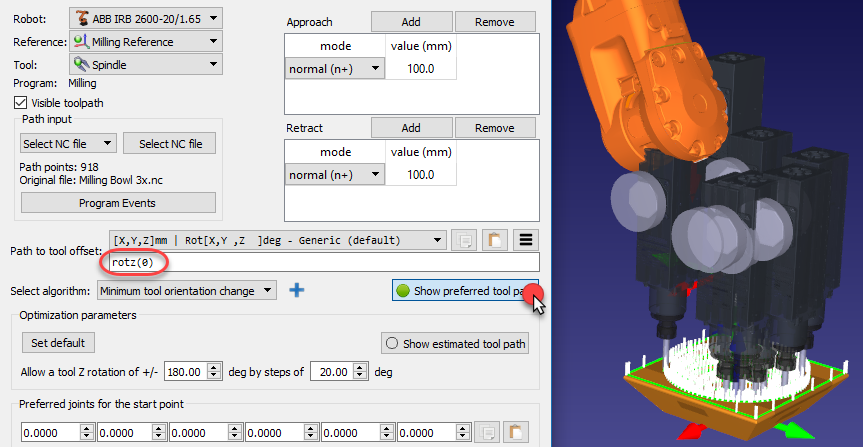
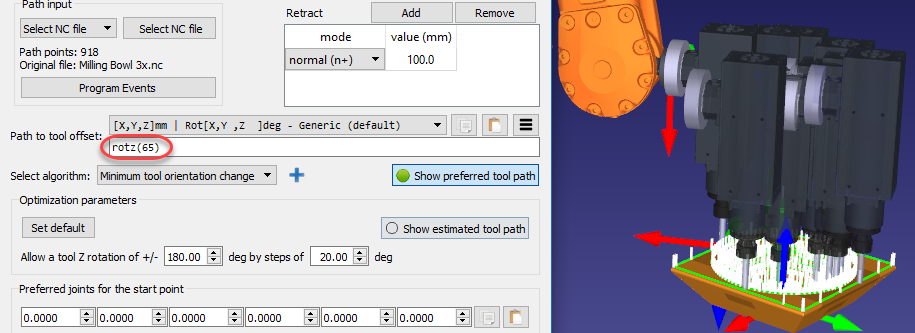
De forma predeterminada, la compensación de la ruta de herramienta muestra una transformación Rotz(0). Este valor puede ser modificado para establecer la orientación preferida de la herramienta, modificando la orientación alrededor del eje Z del TCP o en combinación con otros ejes. La orientación preferida es la orientación que el robot tratará de mantener mientras sigue la trayectoria de herramienta.
De forma predeterminada, RoboDK utiliza el algoritmo de Cambio Mínimo de orientación de herramienta. Esto significa que la orientación de la herramienta se mantiene lo más constante posible a lo largo de la trayectoria. En general, esta opción es apta para operaciones de fresado ya que minimiza los movimientos de articulaciones de robots. Alternativamente, otros algoritmos/métodos están disponibles, como la orientación de la herramienta siguiendo la trayectoria (útil para aplicaciones de corte), o el robot tomando el objetosi es necesario seguir la trayectoria de herramienta conectada a la máquina robot (por ejemplo, para aplicaciones de dispensación o pulido).