Configuración Para Mecanizado
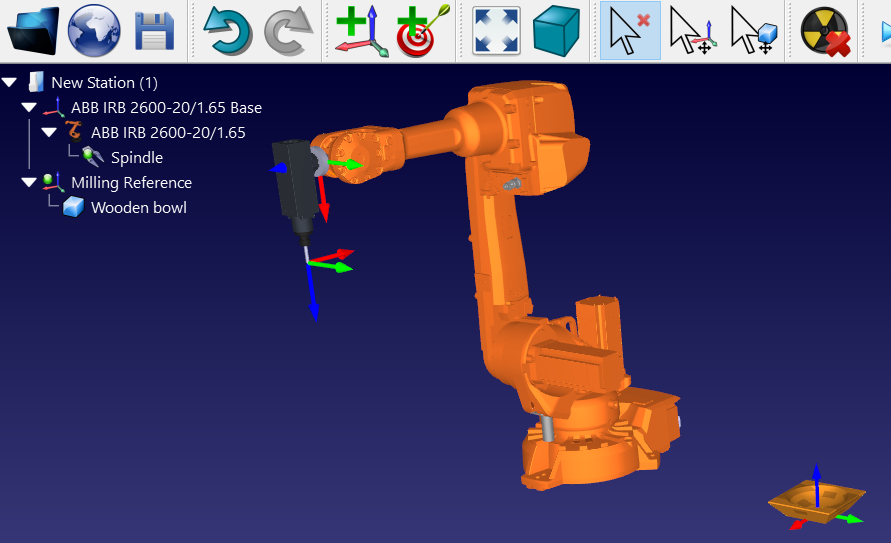
Esta sección muestra cómo preparar una estación de RoboDK simple sin conexión para mecanizado robótico. Una estación RoboDK contiene todos los robots, herramientas, sistemas de referencia, objetos y otros ajustes. Más información sobre la construcción de una estación de RoboDK en la sección empezar.
Se requiere tener un robot con una herramienta y el objeto 3D en un sistema de referencia para configurar un proyecto de mecanizado de robots:
1-Seleccione un robot:
a.Seleccione Archivo➔
b.Use los filtros para encontrar su robot por marca, carga útil,...
Por ejemplo, seleccione el ABB IRB 2600-20/1.65 (carga útil de 20 kilogramos, alcance de 1, 65 m).
c.Seleccione Descargar y el robot debería aparecer automáticamente en la pantalla principal.
2-Seleccione una herramienta:
a.De la misma biblioteca en línea, filtrar por Tipo➔Herramienta
b.Descargue una herramienta giratoria
c.La herramienta debe estar conectada automáticamente al robot
Una vez cargada la herramienta la Biblioteca en línea puede cerrarse
3-Agregar un sistema de referencia:
a.Seleccione Programa➔
b.Seleccione el nuevo sistema de referencia en el árbol y seleccione F2 para cambiarle el nombre a Referencia de Fresado
4-Agregar un objeto:
a.Seleccione Archivo➔
b.Seleccione un objeto denominado Object wooden bowl.sld
c.Arrastrar y soltar el objeto a la referencia de fresado (dentro del árbol de la estación)