Configuración preferida
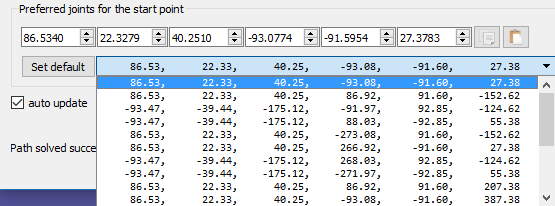
RoboDK selecciona automáticamente la configuración de inicio que está más cerca de las articulaciones de inicio preferidas (Articulaciones preferidas para el punto de partida). A partir de ese punto, el robot seguirá movimientos lineales, por lo que la configuración del robot no cambiará.
Un menú desplegable mostrará todas las posibles soluciones para iniciar el programa. Si es necesario, seleccione una configuración preferida y seleccione Actualizar para recalcular el programa.