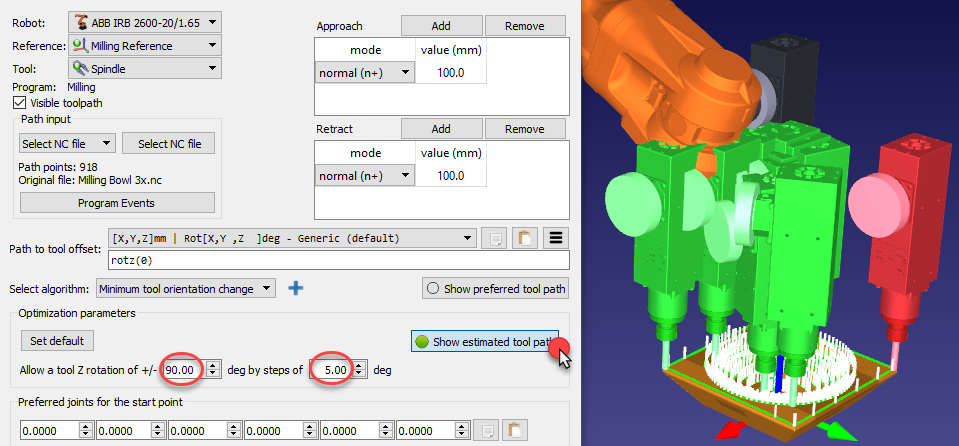
Parámetros de optimización
Dada una orientación preferida, el robot puede tener una cierta libertad para dar la vuelta al eje Z de la herramienta. Esto permite al robot realizar el programa evitando singularidades de robots y restricciones de ejes. De forma predeterminada, RoboDK permite que la herramienta gire hasta +/-180 grados alrededor del eje TCP por pasos de 20 grados.
Se recomienda restringir esta rotación en función de la aplicación. Por ejemplo, es posible introducir +/-90 grados para restringir el Permitido Rotación por la mitad.
Consejo: Seleccione Mostrar trayectoria de herramienta estimada para ver los puntos accesibles (en verde) y los puntos inalcanzables (en rojo). Es posible que los puntos accesibles se roten con respecto a la trayectoria de herramienta preferida para que el robot pueda acceder a los destinos.
Si no se alcanzan algunos puntos de la ruta, se recomienda mover el sistema de referencia o ser más permisivo con la rotación de la herramienta Z. El sistema de referencia se puede mover manteniendo pulsada la tecla Alt.
Nota: La trayectoria de herramienta estimada se mostrará como el sistema de referencia o el TCP se modificará si la opción Actualización Automática está marcada.
Consejo: Los valores de paso más pequeños permiten una reorientación más gradual de la herramienta, ya que está cruzando una singularidad. Por otro lado, podría tardar más en calcular la trayectoria de herramienta.
Nota: Establezca la rotación permitida alrededor de Z a 0 grados para restringir completamente la herramienta de acuerdo con la orientación preferida.