Proyecto de Seguimiento de Punto
Es posible hacer que un robot siga los puntos en el espacio 3D con RoboDK. Los puntos en RoboDK pueden ser extraídos de objetos, curvas o Importados como una lista de puntos en archivos CSV. Esta opción es útil para la soldadura por puntos o aplicaciones de perforación, por ejemplo. El siguiente vídeo muestra un ejemplo para configurar una aplicación de soldadura por puntos: Ver vídeo.
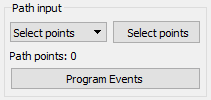
Seleccione Utilidades➔Proyecto de Seguimiento de Punto para abrir la configuración de seguimiento de punto. Estos ajustes son los mismos que para Proyecto de Maquinado Robótico, la única diferencia es que la Entrada de ruta está preajustada para Seleccionar Puntos.
Seleccione Seleccionar Puntos para seleccionar el (los) punto (s) en la pantalla.
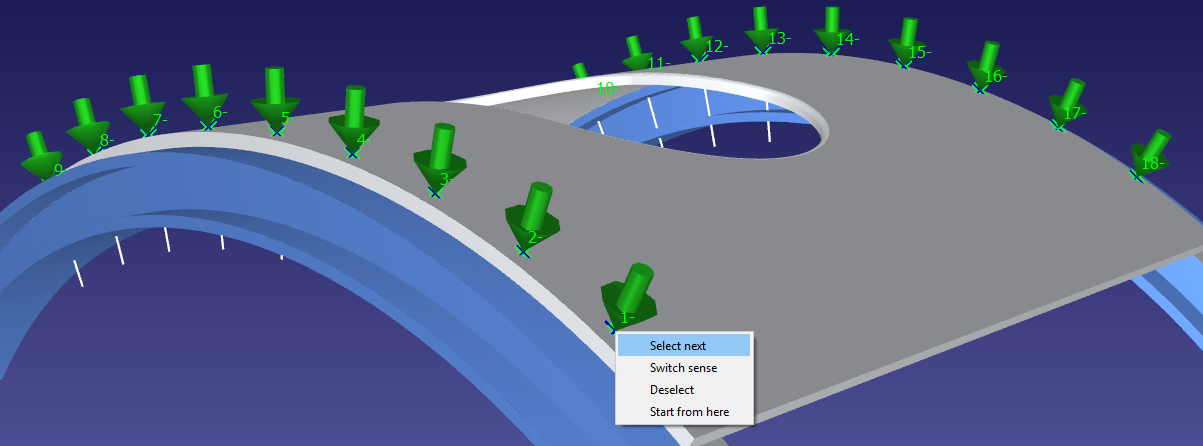
Seleccione los puntos con un clic izquierdo del ratón. Seleccionando el mismo punto dos veces intercambiará la dirección de aproximación. También, haciendo clic con el botón derecho permite seleccionar los puntos que siguen seleccionando Seleccionar siguiente.
Haga clic derecho en la pantalla y seleccione Hecho o pulse la tecla Esc para volver al menú de ajustes. El trazado verde mostrará el movimiento del robot con respecto al objeto.
Algunas opciones adicionales están disponibles en la parte superior derecha de la configuración, como la velocidad de la herramienta y la distancia de aproximación. La configuración predeterminada se muestra en la siguiente imagen:

Importar puntos
Una lista de puntos puede ser importado de un archivo de texto o un archivo CSV seleccionando Utilidades➔Importar Puntos. Un nuevo elemento aparecerá en la estación que muestra los puntos como un objeto.
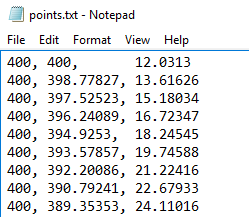
El archivo puede ser un archivo de texto con las coordenadas 3D de cada punto de la curva. Opcionalmente, la orientación del eje Z de la herramienta se puede proporcionar como un vector I,J,K.
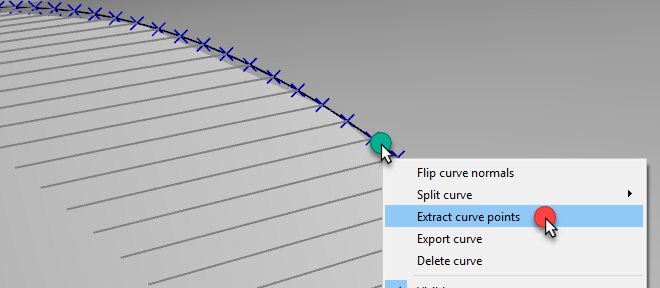
Opcionalmente, las curvas existentes de un objeto se pueden convertir en puntos haciendo clic derecho en una curva, luego, seleccionando Extraer puntos de curva.