Establecer valor de Redondeo
Seleccione Programa➔
Sin una instrucción de redondear, el robot alcanzará la velocidad de 0 al final de cada movimiento (a menos que el movimiento siguiente sea tangente al movimiento anterior). Esto provocará altas aceleraciones y cambios rápidos de velocidad para garantizar la mejor precisión en cada movimiento.
Este valor también se conoce como radio Blending (Universal Robots), ZoneData (robots de ABB), CNT/FINE (robots de FANUC), Cornering (robots de Mecademic) o $APO.CDIS/$APO. CPTP/Advance (robots KUKA).
Algunos controladores requieren configurar este valor como un porcentaje, por ejemplo, en un controlador Fanuc, si desea proporcionar el comando CNT5, debe entrar el valor 5.
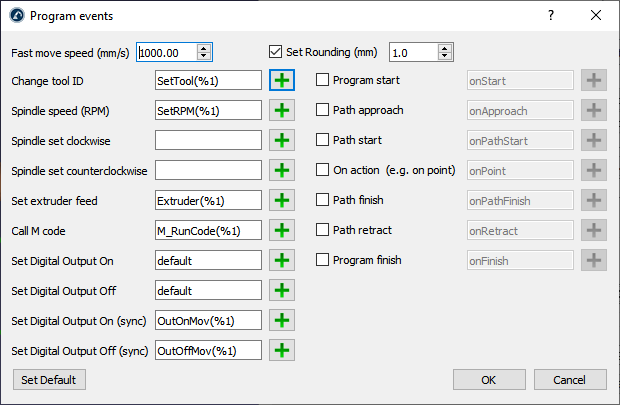
También puede especificar el parámetro de redondeo en la ventana eventos del programa si está generando sus programas para el mecanizado de robots, la impresión 3D o el seguimiento de curvas/puntos.
Las pruebas de exactitud de la trayectoriade RoboDK permiten comprender mejor el efecto de las diferentes estrategias de redondeo.