Instrucciones del programa
Es posible añadir nuevas instrucciones haciendo clic derecho sobre un programa o desde el Menú del programa, como se muestra en la sección anterior.
Esta sección describe las instrucciones admitidas por la interfaz gráfica de usuario de RoboDK para la programación fuera de línea del robot.
Mover articulación
Seleccione Programa➔
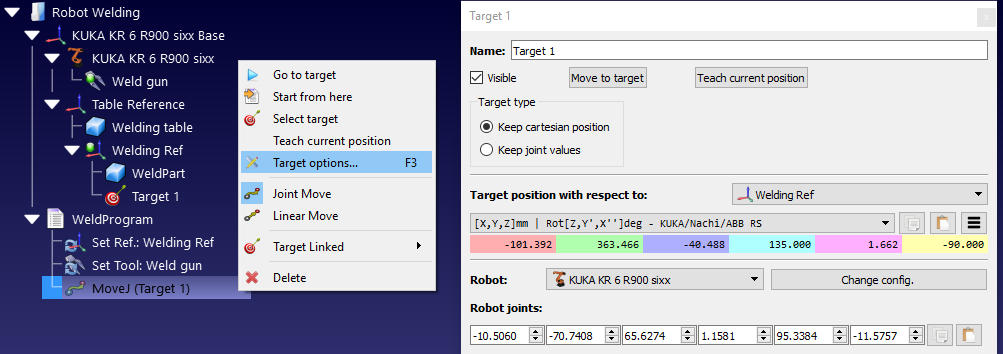
A menos que se seleccione un objetivo antes de añadir la instrucción, la instrucción de movimiento creará un nuevo objetivo y se vincularán. Si se mueve el objetivo, el movimiento también se modifica.
Si esta es la primera instrucción que se agrega al programa, se agregarán dos instrucciones más antes de la instrucción de movimiento: una Selección de sistema de referencia y una Selección de sistema de herramienta. Esto asegurará que cuando el programa llegue a la instrucción de movimiento, el robot estará utilizando la misma referencia y los sistemas de herramientas utilizados para crear este nuevo objetivo.
Movimiento lineal
Seleccione Programa➔
A menos que se seleccione un objetivo antes de añadir la instrucción, la instrucción de movimiento creará un nuevo objetivo y se enlazarán. Si se mueve el objetivo, el movimiento también se modifica.
Los movimientos articulares y los movimientos lineales se comportaron de la misma manera y se pueden cambiar fácilmente de un tipo a otro.
Igual que con la instrucción de movimiento de articulación, si éste es el primera instrucción que se añade al programa, se agregarán dos instrucciones más antes de la instrucción de movimiento: una Selección de sistema de referencia y una Selección de sistema de herramienta.
A diferencia de los movimientos articulares, los movimientos lineales son sensibles a las singularidades del robot y a los límites de los ejes. Por ejemplo, los robots de 6 ejes no pueden cruzar una singularidad siguiendo un movimiento lineal. La siguiente imagen muestra un ejemplo que dice que La articulación 5 está demasiado cerca de una singularidad (0 grados). [...] Como alternativa, considere un movimiento articular. Como se muestra en la siguiente imagen.
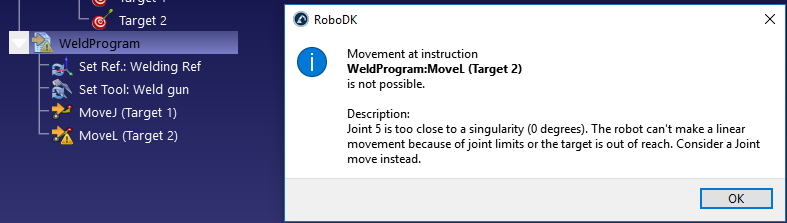
Si no es estrictamente necesario un movimiento lineal, haga clic con el botón derecho en la instrucción de movimiento y cámbielo a un movimiento articular (Joint Move).
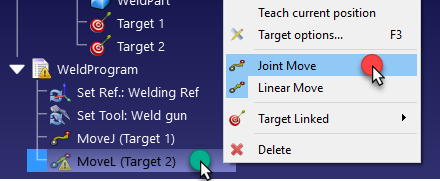
Alternativamente, el objetivo, el TCP o la posición del sistema de referencia deben ser modificados para evitar la singularidad.
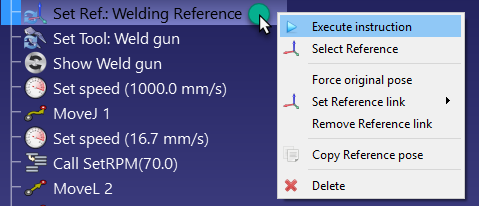
Establecer sistema de referencia
Seleccione Programa➔
El sistema de referencia es una variable también conocida como Objeto de Trabajo (robots ABB), UFRAME (robots FANUC), FRAME (para robots Motoman) o $BASE (para robots KUKA).
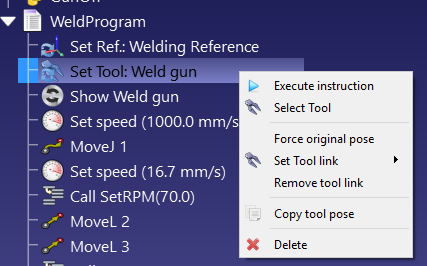
Establecer sistema de herramienta
Seleccione Programa➔
El sistema de referencia es una variable también conocida como Tooldata (robots ABB), UTOOL (robots FANUC), TOOL (para robots Motoman) o $TOOL (para robots KUKA).
Movimiento circular
Seleccione Programa➔
A menos que se seleccionen dos objetivos antes de añadir la instrucción, la instrucción de movimiento no creará nuevos objetivos. Se requiere añadir dos objetivos más por separado y vincularlos a la instrucción de movimiento circular, como se muestra en la siguiente imagen.
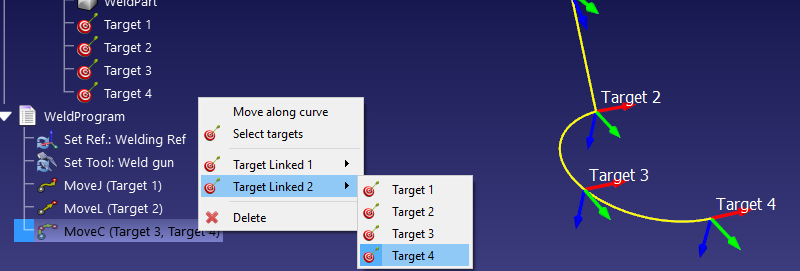
El movimiento circular es un arco creado desde el punto en el que se encuentra el robot, pasando por el primer punto circular (objetivo enlazado 1) y terminando en el punto final (objetivo enlazado 2).
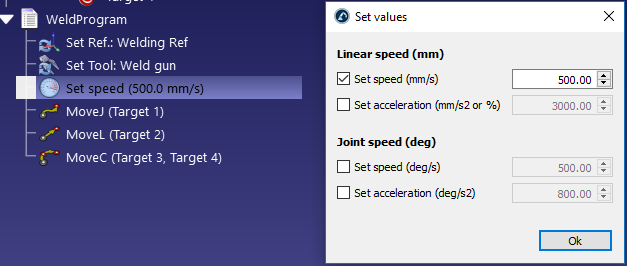
Fijar velocidad
Seleccione Programa➔
Activar los casos correspondientes para imponer una velocidad específica y/o aceleración en el programa. La velocidad del robot se aplica desde el momento en que se ejecuta esta instrucción.
La velocidad del robot también se puede cambiar en el menú de parámetros del robot: haga doble clic en el robot, a continuación, seleccione parámetros.
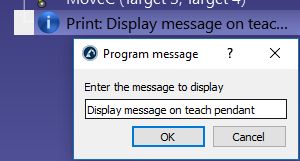
Mostrar mensaje
Seleccione Programa➔
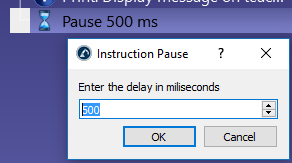
Pausa
Seleccione Programa➔
Llamada de programa
Seleccione Programa➔
De forma predeterminada, se trata de una llamada de bloqueo a un programa específico. Sin embargo, es posible cambiar a Insertar código para introducir código específico en la ubicación de esta instrucción. Esto puede ser útil para una aplicación específica y un controlador específico.
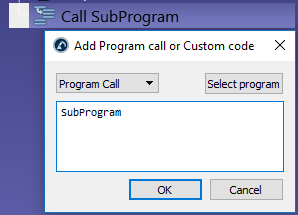
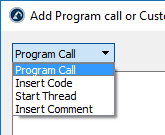
Cambie de Llamada del programa a Iniciar subproceso para provocar una llamada sin bloqueo a un subprograma. En este caso, el controlador comenzará un nuevo proceso. Esta opción sólo está disponible para determinados controladores y sólo funciona para operaciones específicas.
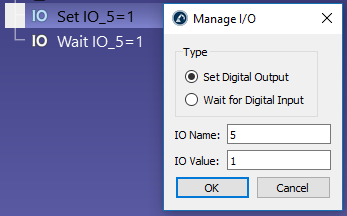
Establecer/esperar ES
Seleccione Programa➔
El nombre de ES puede ser un número o un valor de texto si se trata de una variable con nombre. El valor ES puede ser un número (0 para Falso y 1 para Verdadero) o un valor de texto si es un estado con nombre.
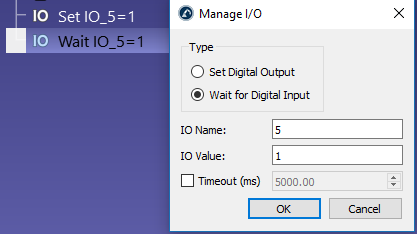
Establecer como Esperar Entrada Digital para detener la ejecución del programa hasta que una entrada específica cambie a un valor específico. Además, la mayoría de los controladores de robots admite un retraso de tiempo de espera para generar un error si el tiempo de espera excede un valor específico. Compruebe la opción del tiempo de espera (ms) para activar esta función.
La alteración de las entradas y salidas digitales simuladas creará nuevas variables de estación.. Para comprobar el estado de estas variables, puede hacer clic con el botón derecho de la estación y seleccionar los parámetros de la estación. También es posible leer o modificar estas variables a través de la API.
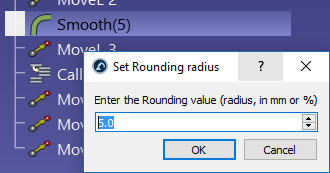
Establecer valor de Redondeo
Seleccione Programa➔
Sin una instrucción de redondear, el robot alcanzará la velocidad de 0 al final de cada movimiento (a menos que el movimiento siguiente sea tangente al movimiento anterior). Esto provocará altas aceleraciones y cambios rápidos de velocidad para garantizar la mejor precisión en cada movimiento.
Este valor también se conoce como radio Blending (Universal Robots), ZoneData (robots de ABB), CNT/FINE (robots de FANUC), Cornering (robots de Mecademic) o $APO.CDIS/$APO. CPTP/Advance (robots KUKA).
Algunos controladores requieren configurar este valor como un porcentaje, por ejemplo, en un controlador Fanuc, si desea proporcionar el comando CNT5, debe entrar el valor 5.
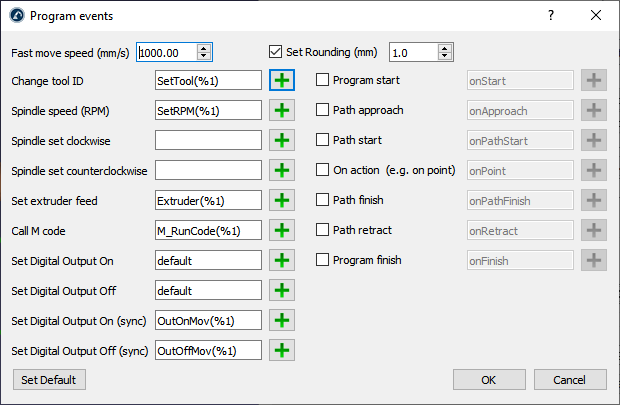
También puede especificar el parámetro de redondeo en la ventana eventos del programa si está generando sus programas para el mecanizado de robots, la impresión 3D o el seguimiento de curvas/puntos.
Las pruebas de exactitud de la trayectoriade RoboDK permiten comprender mejor el efecto de las diferentes estrategias de redondeo.
Evento de simulación
Puede crear eventos específicos destinados a la simulación utilizando una instrucción de evento de simulación. Los eventos de simulación no tienen ningún impacto en el robot real ni en el programa de robot generado.
Seleccione Programa Instrucción de evento de simulación para añadir un evento de simulación personalizado. Este tipo de instrucción provocará un evento específico solo con fines de simulación, como adjuntar un objeto a una pinza, dejarlo caer sobre una mesa o crear objetos para simular un alimentador.
Puede utilizar la interfaz de usuario para activar las acciones como eventos de simulación:
3.Adjuntar un objeto a una herramienta.
4.Separar un objeto de una herramienta y dejarlo caer en un sistema de coordenadas.
5.Mostrar uno o más objetos o herramientas.
6.Ocultar uno o más objetos o herramientas.
7.Establecer la posición absoluta de uno o más objetos o sistemas de referencia.
8.Establecer la posición relativa de uno o más objetos o sistemas de referencia.
9.Establecer las articulaciones del robot en la posición de origen (home).
10.Mover el transportador.
11.Crear objeto.
12.Eliminar objetos.
13.Esperar por un objeto.
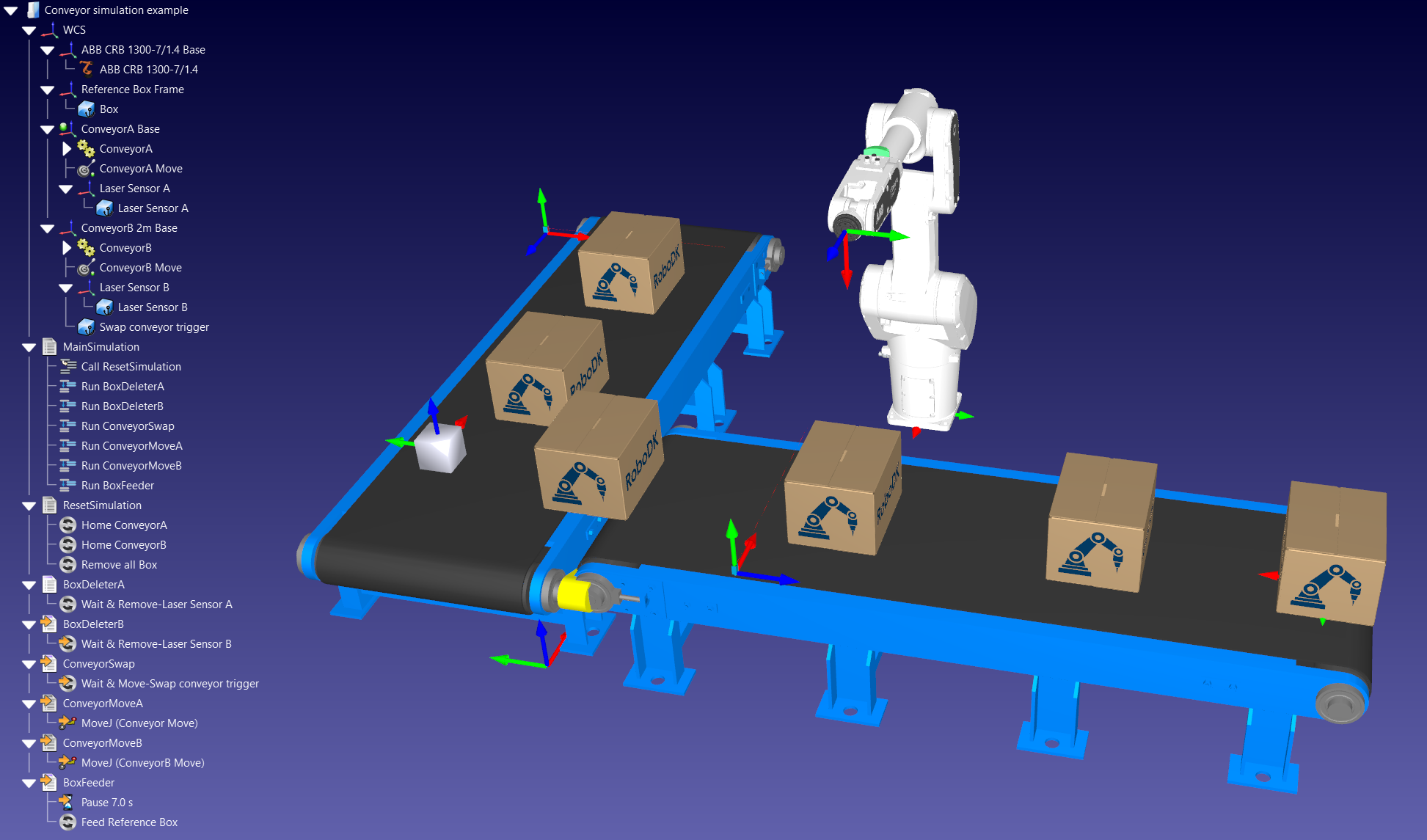
Combinando los eventos de simulación adecuados, puede crear simulaciones con la interfaz de usuario para el manejo de materiales o mover objetos a través de transportadores en la simulación según lo desee.
Adjuntar objeto
El evento de simulación de adjuntar objeto le permite adjuntar un objeto a una herramienta para simular una acción de recogida.
Cuando se activa la acción de adjuntar un objeto a una herramienta, se adjunta el objeto más cercano a la herramienta seleccionada. Se utiliza una tolerancia predeterminada de 200 mm para ignorar cualquier objeto más alejado que esta distancia.
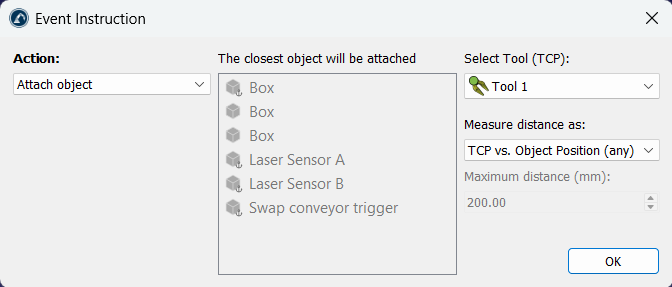
Si no especifica una tolerancia de distancia, se utilizará el valor predeterminado global (puede cambiar el valor predeterminado global en Herramientas Opciones Distancia máxima para adjuntar un objeto a una herramienta de robot). Además, de forma predeterminada, la distancia se comprueba desde la ubicación del TCP hasta la referencia del objeto. Alternativamente, es posible utilizar la distancia entre el TCP y la geometría del objeto seleccionando Comprobar la distancia más corta entre el TCP y la forma del objeto.
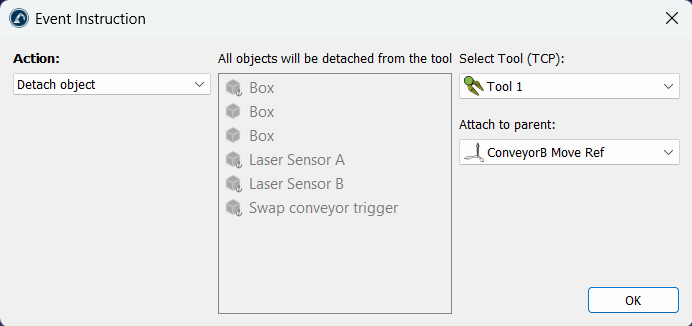
Separar objeto
El evento de simulación de separar objeto le permite separar un objeto de una herramienta hacia otro objeto o sistema de coordenadas.
Debe elegir la herramienta de la que se deben separar los objetos y el sistema de coordenadas u objeto al que se deben adjuntar posteriormente.
El evento de simulación de separar objeto le permite simular una operación de colocación/soltado en una aplicación de recogida y colocación (realizando la acción opuesta al evento de adjuntar).
Por ejemplo, si el robot se desplaza a una ubicación específica para agarrar un objeto, podemos configurar un evento de Adjuntar objeto para mover ese objeto junto con el robot. Después, cuando el robot se haya movido y esté listo para soltar los objetos agarrados, puede activar un evento de Separar objeto para dejar cualquier objeto que la herramienta del robot haya agarrado.
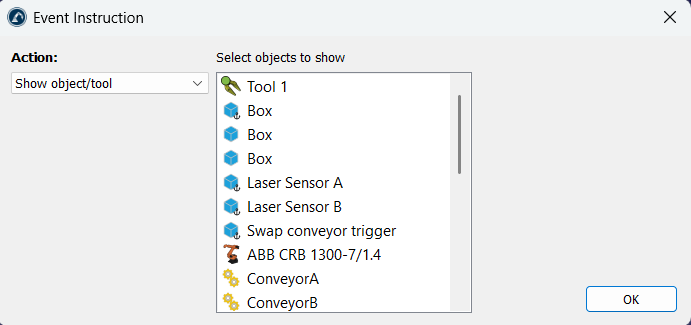
Mostrar objetos o herramientas
El evento de mostrar objetos o herramientas le permite hacer visibles uno o más objetos, herramientas o robots dentro del entorno de simulación.
Puede seleccionar uno o más elementos manteniendo pulsada la tecla Ctrl.
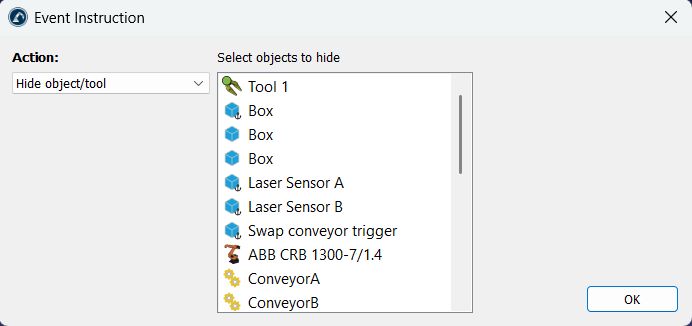
Ocultar objetos o herramientas
El evento de ocultar objetos o herramientas le permite hacer invisibles uno o más objetos o herramientas dentro de la simulación.
Puede seleccionar uno o más elementos manteniendo pulsada la tecla Ctrl.
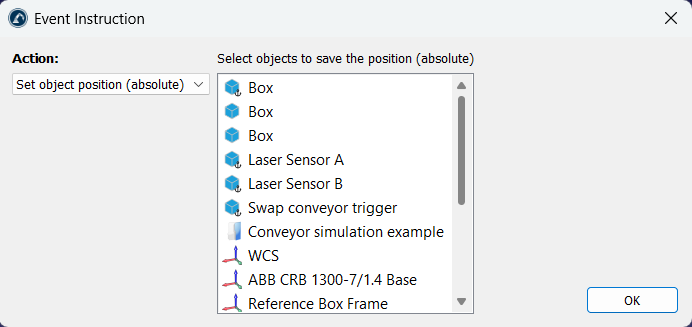
Establecer la posición absoluta
Establecer posición de objeto (absoluta) le permite actualizar la posición de cada objeto seleccionado cuando se activa esta acción. La referencia principal a la que está adjunto cada elemento no se modifica. Solo se actualiza la posición de cada objeto.
Puede seleccionar uno o más elementos manteniendo pulsada la tecla Ctrl. La posición actual del elemento se registra cuando pulsa Aceptar.
Establecer la posición relativa
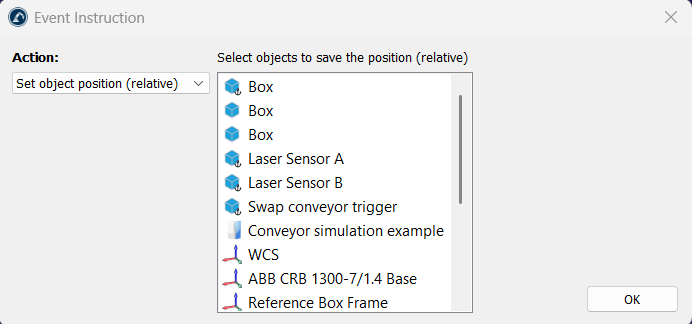
Establecer posición de objeto (relativa) le permite actualizar la posición y la referencia principal de cada objeto seleccionado cuando se activa esta acción. La referencia principal a la que está adjunto cada elemento también se modifica y la posición de cada objeto también se actualiza.
Puede seleccionar uno o más elementos manteniendo pulsada la tecla Ctrl. La posición actual del elemento y la referencia principal a la que está adjunto se registran cuando pulsa Aceptar.
La diferencia entre esta instrucción y la instrucción de posición absoluta es que esta instrucción también actualiza la referencia principal a la que está adjunto cada objeto.
Establecer el robot en posición de origen
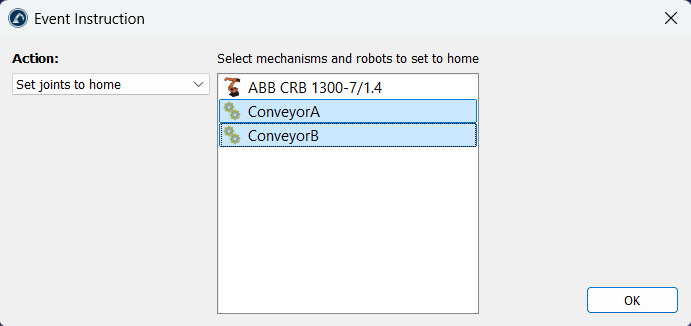
El evento de establecer las articulaciones en posición de origen hace que el robot o los mecanismos seleccionados se muevan inmediatamente a sus posiciones articulares de origen ("home") definidas (el movimiento no se simula a lo largo del tiempo).
Esto es útil cuando necesita reiniciar una simulación y colocar los transportadores en la posición inicial.
Puede seleccionar uno o más elementos manteniendo pulsada la tecla Ctrl.
Evento de mover transportador
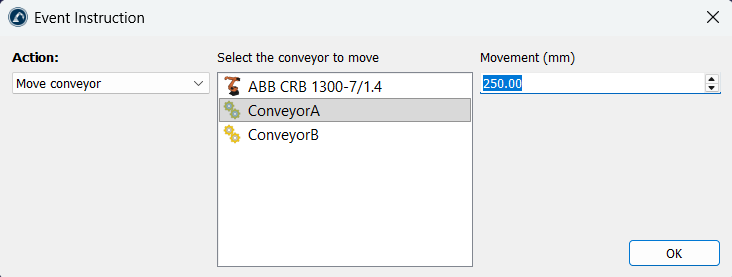
El evento de mover transportador simula el movimiento del transportador una distancia específica, simulando el efecto del movimiento a lo largo del tiempo.
Esto es útil cuando necesita simular un incremento específico para procesar un objeto en el transportador una vez que se mueve una distancia específica.
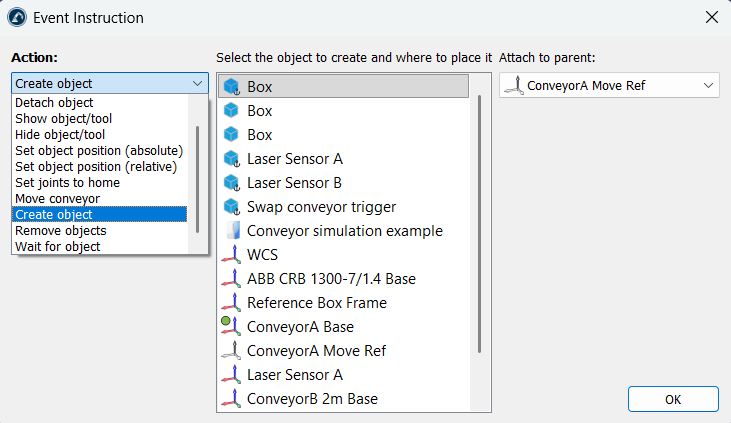
Crear objeto
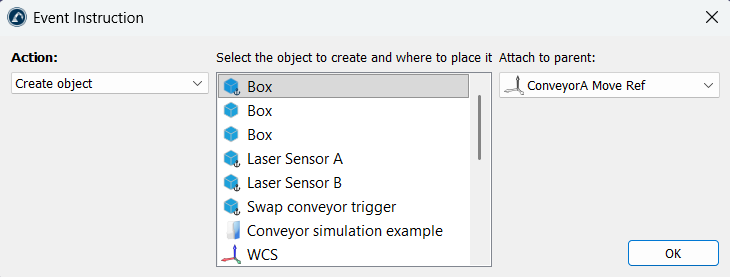
La instrucción Crear objeto le permite simular un alimentador creando un nuevo objeto en el entorno de simulación.
Debe seleccionar el objeto modelo a crear y la referencia principal a la que se deben adjuntar los elementos.
Esta acción es útil para crear nuevos objetos en un transportador.
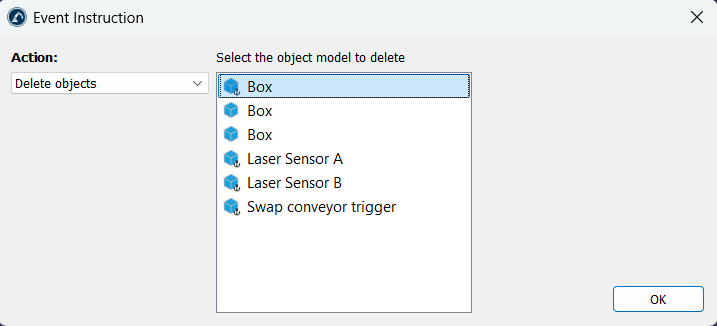
Eliminar objetos
La instrucción Eliminar objetos elimina objetos del entorno de simulación.
Debe seleccionar un objeto modelo que desea eliminar. Cualquier objeto que coincida con el nombre y la geometría del mismo objeto se elimina cuando se activa esta acción. El objeto modelo seleccionado y cualquier objeto bloqueado no se eliminan.
Esta instrucción ayuda a limpiar una simulación que ha finalizado y en la que tiene muchos objetos que fueron creados por la instrucción Crear objeto.
Esperar por un objeto
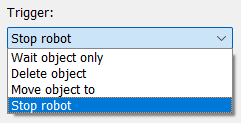
La instrucción Esperar por un objeto espera a que un objeto esté en contacto con otro objeto para activar una acción específica.
Este evento es útil cuando desea activar una acción basada en el contacto entre objetos. Es habitual colocar esta instrucción sola en un programa que se ejecuta en un bucle y que realiza una acción específica cuando un objeto está en contacto con un sensor.
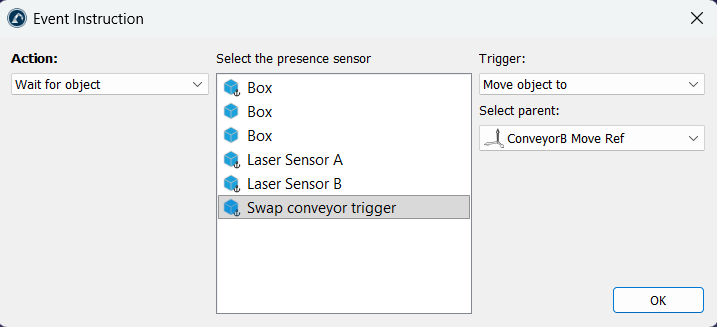
Las acciones que puede realizar cuando un objeto está en contacto con el sensor son las siguientes:
1.Detener un robot: debe seleccionar el robot o mecanismo que debe detenerse.
2.Eliminar un objeto: el objeto debe eliminarse de la estación.
3.Esperar únicamente por el objeto (por ejemplo, puede activar un robot para que recoja un objeto).
4.Mover un objeto a otro sistema de coordenadas. Por ejemplo, para adjuntar un objeto de un transportador a otro.