Movimiento circular
Seleccione Programa➔
A menos que se seleccionen dos objetivos antes de añadir la instrucción, la instrucción de movimiento no creará nuevos objetivos. Se requiere añadir dos objetivos más por separado y vincularlos a la instrucción de movimiento circular, como se muestra en la siguiente imagen.
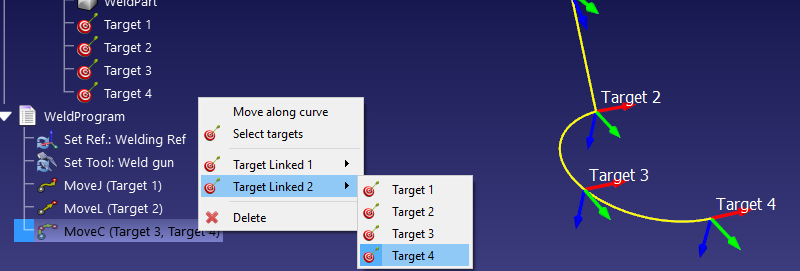
El movimiento circular es un arco creado desde el punto en el que se encuentra el robot, pasando por el primer punto circular (objetivo enlazado 1) y terminando en el punto final (objetivo enlazado 2).
Importante: No es posible lograr un círculo completo con solamente una instrucción circular. Un círculo completo debe dividirse en dos movimientos circulares separados.