Movimiento lineal
Seleccione Programa➔
A menos que se seleccione un objetivo antes de añadir la instrucción, la instrucción de movimiento creará un nuevo objetivo y se enlazarán. Si se mueve el objetivo, el movimiento también se modifica.
Los movimientos articulares y los movimientos lineales se comportaron de la misma manera y se pueden cambiar fácilmente de un tipo a otro.
Igual que con la instrucción de movimiento de articulación, si éste es el primera instrucción que se añade al programa, se agregarán dos instrucciones más antes de la instrucción de movimiento: una Selección de sistema de referencia y una Selección de sistema de herramienta.
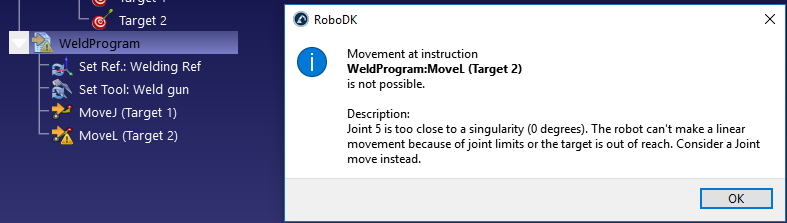
A diferencia de los movimientos articulares, los movimientos lineales son sensibles a las singularidades del robot y a los límites de los ejes. Por ejemplo, los robots de 6 ejes no pueden cruzar una singularidad siguiendo un movimiento lineal. La siguiente imagen muestra un ejemplo que dice que La articulación 5 está demasiado cerca de una singularidad (0 grados). [...] Como alternativa, considere un movimiento articular. Como se muestra en la siguiente imagen.
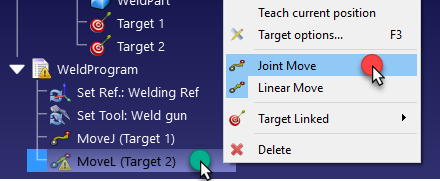
Si no es estrictamente necesario un movimiento lineal, haga clic con el botón derecho en la instrucción de movimiento y cámbielo a un movimiento articular (Joint Move).
Alternativamente, el objetivo, el TCP o la posición del sistema de referencia deben ser modificados para evitar la singularidad.