Edición de los parámetros del test Ballbar
En la siguiente pantalla se puede ver en el menú de parámetros del test Ballbar. Se puede acceder haciendo doble clic al elemento de Validación Exactitud Ballbar en la estación (véase la etapa anterior).
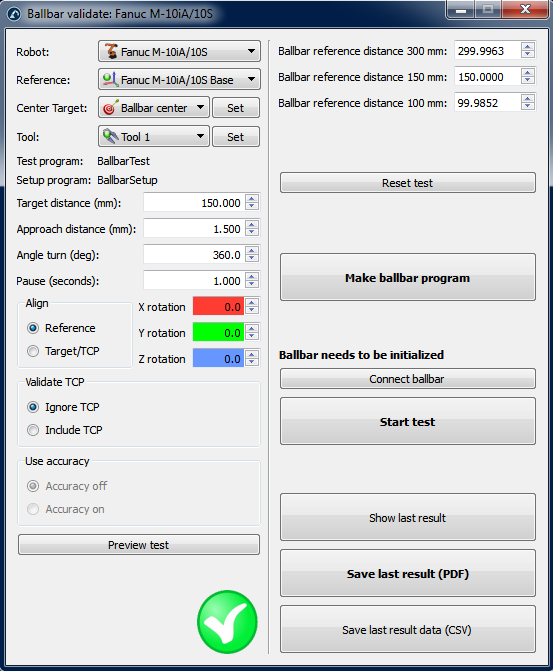
Podría ser que el test Ballbar no sea factible por defecto. La viabilidad del test depende de todos estos parámetros, además de las articulaciones del robot del centro de la herramienta y la posición del TCP.
Si el test no es factible en primer lugar, podemos seleccionar “Vista previa del test” y probablemente veremos una secuencia incompleta. En este caso, podemos disminuir el “Giro de ángulo (grados)” para que el programa sea factible. Si este no es el caso, podemos reducir el radio del círculo ( “Distancia objetivo”). Con Ballbar de Renishaw podemos probar distancias de 100 mm, 150 mm y 300 mm con un error de +/- 1 mm. La “distancia de aproximación (mm)” y la pausa ( “Pausa (segundos)”) se pueden dejar como predeterminado. Estos parámetros permiten detectar el inicio y el final del test.
El plano de prueba está orientado con respecto al sistema de coordenadas de base de robot ( “referencia” en la sección “Alinear”), esto significa que el plano XY del sistema de referencia de robot se utiliza para crear el círculo. Podemos optar por hacer el test con respecto al sistema de coordenadas de la herramienta. En este caso, se utiliza el plano XY de la herramienta (cuando el centro fue enseñado). Podemos añadir rotaciones adicionales con respecto a X, Y y/o eje Z del sistema de referencia en ambos casos.
Si cambiamos ciertos parámetros (como la adición de la herramienta en la validación), el mensaje “Importante: El TCP debe ser preciso” aparecerá. Esto significa que los movimientos se calculan con respecto al centro de la herramienta. De lo contrario, podemos tener errores en el TCP y el test será factible de todos modos.
Si seleccionamos la opción “Incluir TCP” la orientación de la herramienta cambia con el movimiento a lo largo del círculo. Esta opción permite evaluar el error del robot más la herramienta como un sólo sistema. De lo contrario, estamos comprobando el error del robot solamente ( “Ignorar TCP”).