Test Ballbar
En esta sección se describen los pasos necesarios para realizar las medidas Ballbar.
Usted debe tener 2 programas de robot:
●BallbarSetup: Este programa permite ajustar el centro del test Ballbar (centro de la herramienta) en el mismo lugar donde se registraron las articulaciones del robot.
●BallbarTest: Este programa es la trayectoria circular alrededor del centro de la herramienta para hacer la adquisición de medidas con el Ballbar.
Para asegurarse de que la herramienta central está en la posición correcta hay que ejecutar el programa BallbarSetup. El robot se moverá al punto central con un enfoque lineal. Entonces debemos colocar y bloquear el soporte magnético.
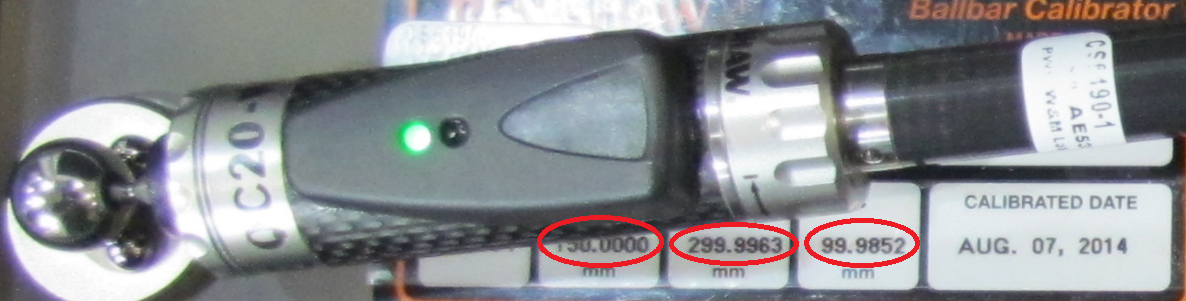
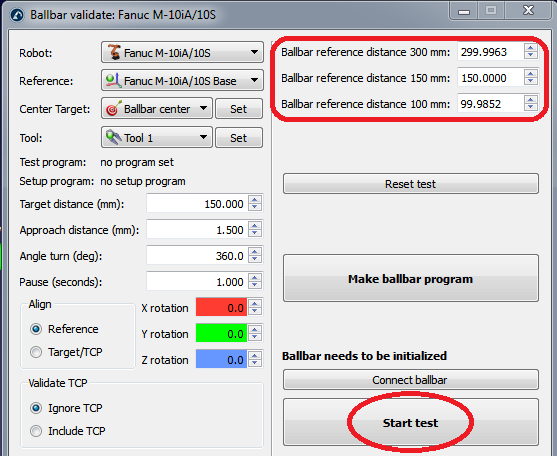
Debemos asegurarnos de que hemos introducido correctamente los parámetros de masterización del kit Ballbar (véase la siguiente imagen). Estos valores deben ser insertados en las cajas “distancia de referencia Ballbar ...” desde el menú de parámetros de prueba. El Ballbar será capaz de medir estas distancias más o menos 1 mm con una precisión de un micrómetro. La precisión es suficiente para los robots industriales, pero el rango de medición puede ser limitado en ciertos casos.
Podemos comenzar con el test mediante la opción “Iniciar test” (no es necesario seleccionar previamente “Conectar Ballbar”). Aparecerá una nueva ventana que muestra el estado de conexión Ballbar. Si el Ballbar no se detectó o hay algunos problemas, debe cerrar la ventana de conexión Ballbar, apagar el dispositivo Ballbar, encenderlo de nuevo y volver a intentarlo para iniciar el test. Si el problema persiste, asegúrese de que tiene una conexión Bluetooth apropiada.
Una vez que la conexión Bluetooth haya sido establecida con el Ballbar, RoboDK guiará al usuario a seguir estos pasos:
1.Inicialice el Ballbar con la distancia seleccionada para el test.
2.Mueva el robot a la posición de inicio (el programa hará una pausa antes de continuar)
3.El usuario debe entonces colocar el Ballbar en el robot.
4.Para empezar el test seleccione OK en la pantalla del computador. El robot no se moverá hasta que seleccionamos continuar en el teach pendant del robot.
5.Si todo es correcto, aparecerá una nueva ventana mostrando la medición actual Ballbar.
6.Podemos continuar con el programa del robot para avanzar a lo largo de la trayectoria.
7.Cuando el robot termina el movimiento, podemos detener las mediciones (en sentido horario y anti horario).
Cuando se realiza la prueba, RoboDK mostrará el resultado del test y le preguntará al usuario para guardar un informe en formato PDF.
El paso 4 es importante para detectar el inicio y el final de la prueba. Estos límites se detectan debido a que el robot realiza un movimiento radial de aproximadamente 1,5 mm para disparar el inicio y el final de las mediciones (en los puntos de inicio y final de la ruta).