Configuración Fuera de Línea
Es recomendada la construcción de un entorno virtual de la configuración real en RoboDK (configuración fuera de línea) para preparar la trayectoria y las posiciones para la prueba. Esto se puede hacer antes de tener el robot y el rastreador, usando sólo una computadora con RoboDK instalado. Ejemplos de configuración de calibración y validación de trayectorias en RoboDK pueden ser descargadas de la carpeta:
https://www.robodk.com/downloads/calibration/
RoboDK tiene una utilidad para generar las configuraciones y la trayectoria recomendada según lo indicado por la norma ISO9283. Para utilizar esta utilidad:
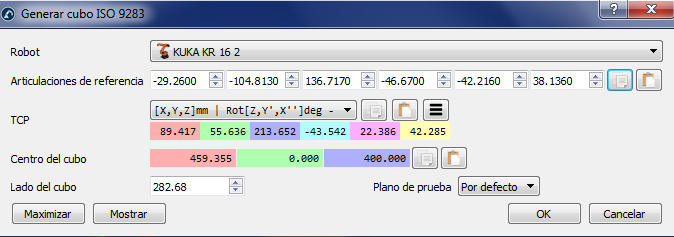
1.Utilidades➔Crear cubo ISO 9283 (objetivos y trayectoria)
2.Introduzca las articulaciones de referencia (posición del robot donde la herramienta se enfrenta al rastreador)
3.Ajuste la posición y el tamaño del cubo
4.Seleccione OK
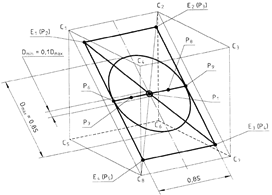
Esto creará los 5 objetivos descritos por la norma ISO, así como la trayectoria recomendada para las pruebas de precisión de la trayectoria. Estos objetivos y el camino se mantienen dentro de un cubo situado en frente del robot. Podemos establecer el lado del cubo deseado, así como mover el centro (objetivo “ISO P1”) y las articulaciones de referencia que definirán la orientación de la trayectoria. También es posible maximizar el tamaño del cubo para encontrar el cubo más grande que cabe en el espacio de trabajo del robot.
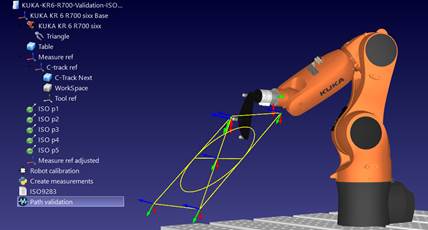
Una estación de muestra con la calibración del robot y las opciones de validación del robot es mostrada en la siguiente imagen.