Introducción
El ISO estándar “ISO9283: Manipulación de robots industriales - Criterios de rendimiento y métodos de ensayo relacionados” describe las pruebas para evaluar el desempeño de los robots industriales. Entre otras cosas, se describen algunos procedimientos para medir adecuadamente la precisión de la posición del robot, repetibilidad, así como la precisión de la trayectoria.
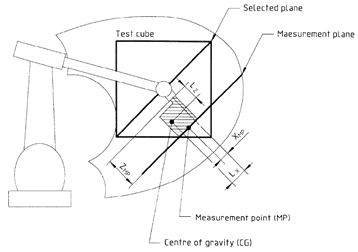
De acuerdo con la norma ISO9283, todas las pruebas deben realizarse dentro del llamado cubo de prueba ISO. El cubo de ensayo ISO se supone que es el cubo más grande que puede caber dentro del espacio de trabajo del robot. Además, la precisión de la posición y repetibilidad deben medirse en cinco configuraciones diferentes 30 veces. Es bien conocido que 5 configuraciones no son suficientes para proporcionar una medición de precisión adecuada para los robots modernos.
La mayoría de los fabricantes de robots sólo proporcionan la precisión posicional del robot si el robot ha sido calibrado, por otra parte, utilizan al menos 100 configuraciones diferentes para proporcionar estadísticas de precisión de posición apropiadas. Los robots industriales son altamente repetitivos pero no precisos; Por lo tanto, la precisión de un robot industrial se puede mejorar a través de la calibración.
Espacio de trabajo típico del robot en los años 80 Espacio de trabajo típico del robot moderno
Sin embargo, la norma ISO9283 se utiliza a menudo para los ensayos de repetibilidad y precisión de la trayectoria, incluso si el robot no se ha calibrado.

Se recomienda ver el siguiente video que muestra las pruebas de precisión de la trayectoria con RoboDK: https://youtu.be/yMQjqAQY1iE.
RoboDK también se puede utilizar para calibrar los robots, así como para poner a prueba su rendimiento antes y después de la calibración. Finalmente, RoboDK también se puede utilizar para probar la precisión del robot antes y después de la calibración a través de pruebas Ballbar.