Precisión de la Trayectoria
Para llevar a cabo pruebas de precisión de trayectoria, se requiere tener un programa de robot creado con RoboDK, tal como el programa ISO9283 creado por la utilidad Crear cubo ISO. Podemos generar el programa específico del proveedor del robot seleccionando el programa y pulsando F6 (o seleccionando Programa➔Generar Programa...). Alternativamente, es posible usar cualquier otro programa creado en RoboDK (tal como una línea recta, un círculo o un cuadrado).
También es necesario tener un sistema de medición que pueda realizar un seguimiento de la posición del efector final y proporcionar las medidas de posición con respecto a un sistema de coordenadas. Se requiere utilizar la configuración de la base y los procedimientos de configuración de herramientas en RoboDK (requerido para realizar pruebas de calibración o exactitud de la posición) para identificar el sistema base del robot y el sistema de la herramienta.
Los datos de medición deben ser adquiridos mientras se mueve el robot a lo largo del programa. Las mediciones deben ser registradas de forma continua, utilizando el software por defecto proporcionado por el fabricante del sistema de medición. Se requiere exportar las mediciones como un archivo CSV o TXT. Estos archivos deben contener datos de posición XYZ, así como la marca de tiempo para cada medición. Opcionalmente, estas mediciones pueden contener la orientación de la herramienta con respecto a la base del robot.
Para iniciar un proyecto de validación de trayectorias en RoboDK:
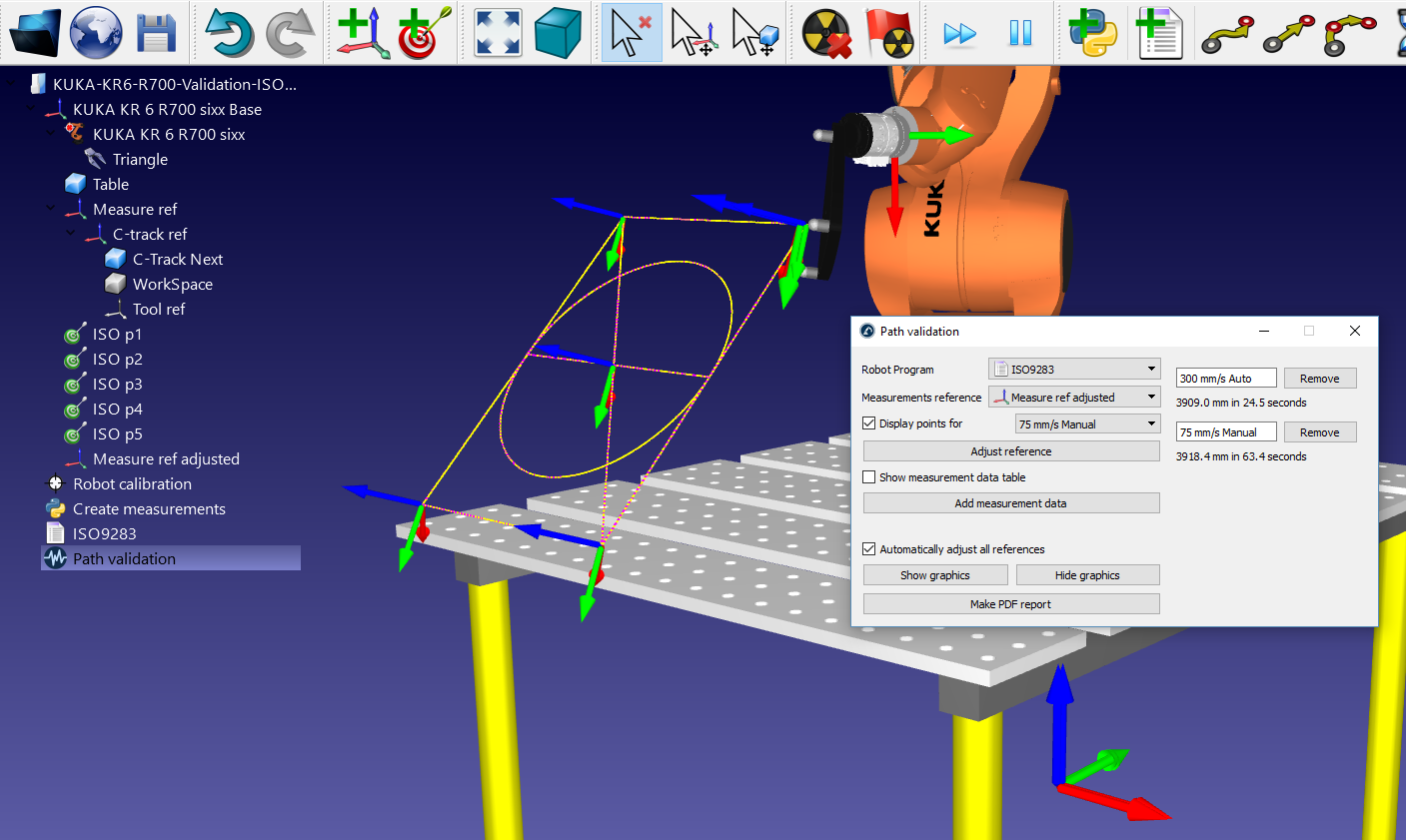
1.Seleccione Utilidades➔Prueba de la precisión de la trayectoria, velocidad y aceleración (ISO 9283)
2.Seleccione el programa que se utiliza para la validación en el menú desplegable
3.Proporcione el sistema de coordenadas utilizado para las mediciones
4.Importe los datos de medición seleccionando Añadir datos de medición. Alternativamente, es posible arrastrar y soltar los archivos CSV o TXT que contienen las mediciones a la ventana de validación de trayectorias.
Por último, seleccione Crear informe en PDF para generar un PDF con algunas estadísticas y gráficos sobre la precisión de la trayectoria, velocidad y aceleración. Es posible ejecutar la misma prueba más de una vez en condiciones diferentes (diferentes velocidades, diferentes valores de redondeo/punta, diferentes capacidades de carga, ...) para comparar estos parámetros en el mismo informe.
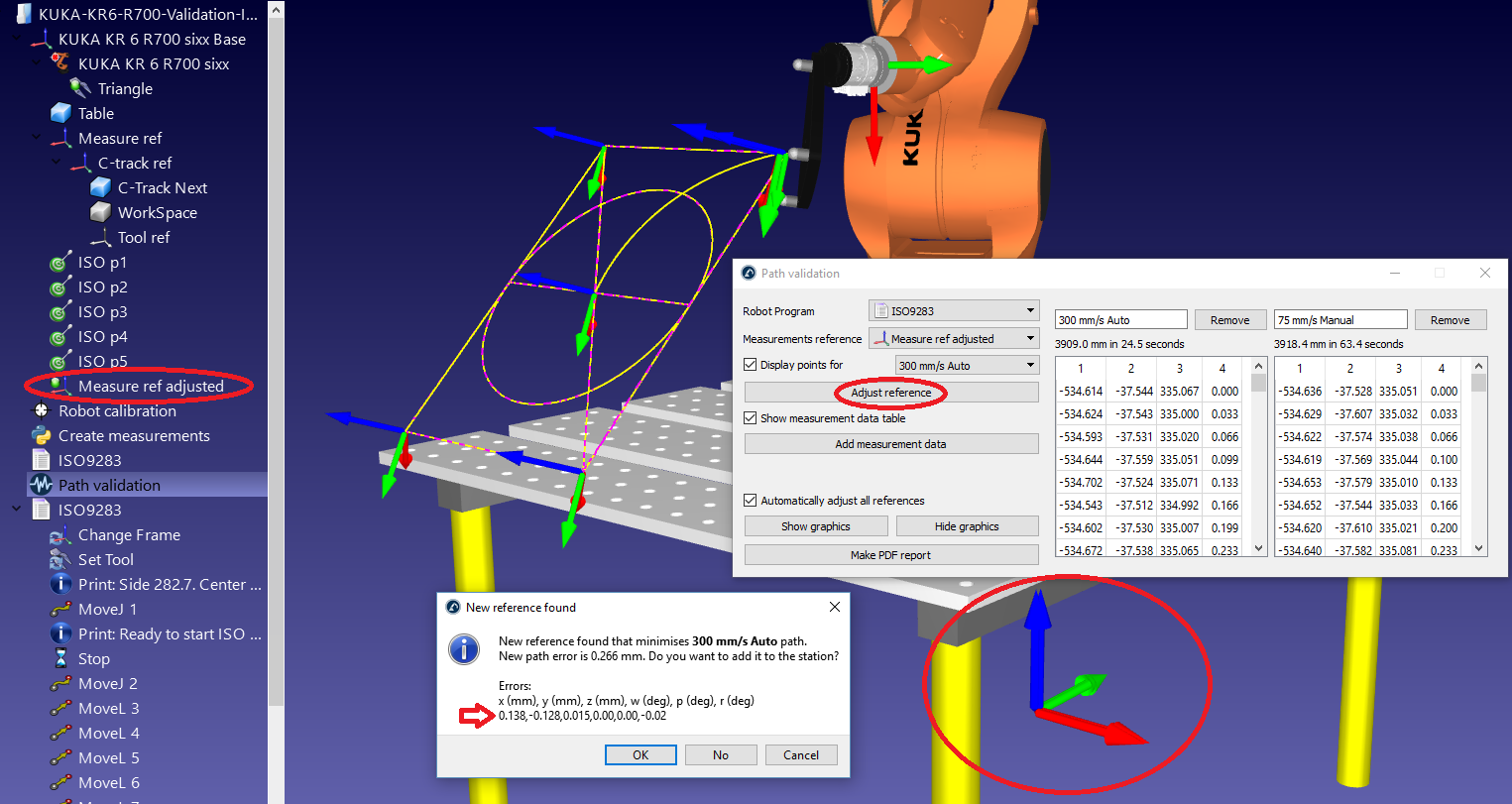
Los puntos de medición pueden visualizarse en violeta. Estas mediciones deben coincidir con la trayectoria amarilla que describe la trayectoria ideal que debe seguir el robot. Las estadísticas proporcionadas por RoboDK son las diferencias entre estos dos caminos.
Si el sistema de coordenadas no se definió adecuadamente los puntos de medición no coincidirán con la trayectoria amarilla. Esto puede ocurrir por varias razones, tales como una definición del sistema de coordenadas incorrecta o una definición de herramienta diferente. En este caso la selección de Ajuste de referencia tratará de adaptarse lo mejor posible a las dos trayectorias de modo que las estadísticas proporcionadas aíslen estos desajustes.