Resultados
Una vez que la prueba de exactitud esté completada es posible obtener un informe PDF seleccionando Crear informe en PDF, desde la ventana de validación de trayectorias. Esto generará un PDF con algunas estadísticas y gráficos sobre la precisión de la trayectoria, velocidad y aceleración.
Los resultados de la prueba de muestra preparada en las secciones anteriores son mostrados en las siguientes imágenes. En este ejemplo, el programa ISO9283 se llevó a cabo en dos modos diferentes:
●Modo manual a 75 mm/s de velocidad
●Modo automático a 300 mm/s de velocidad
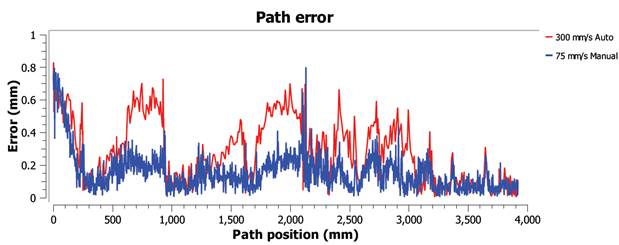
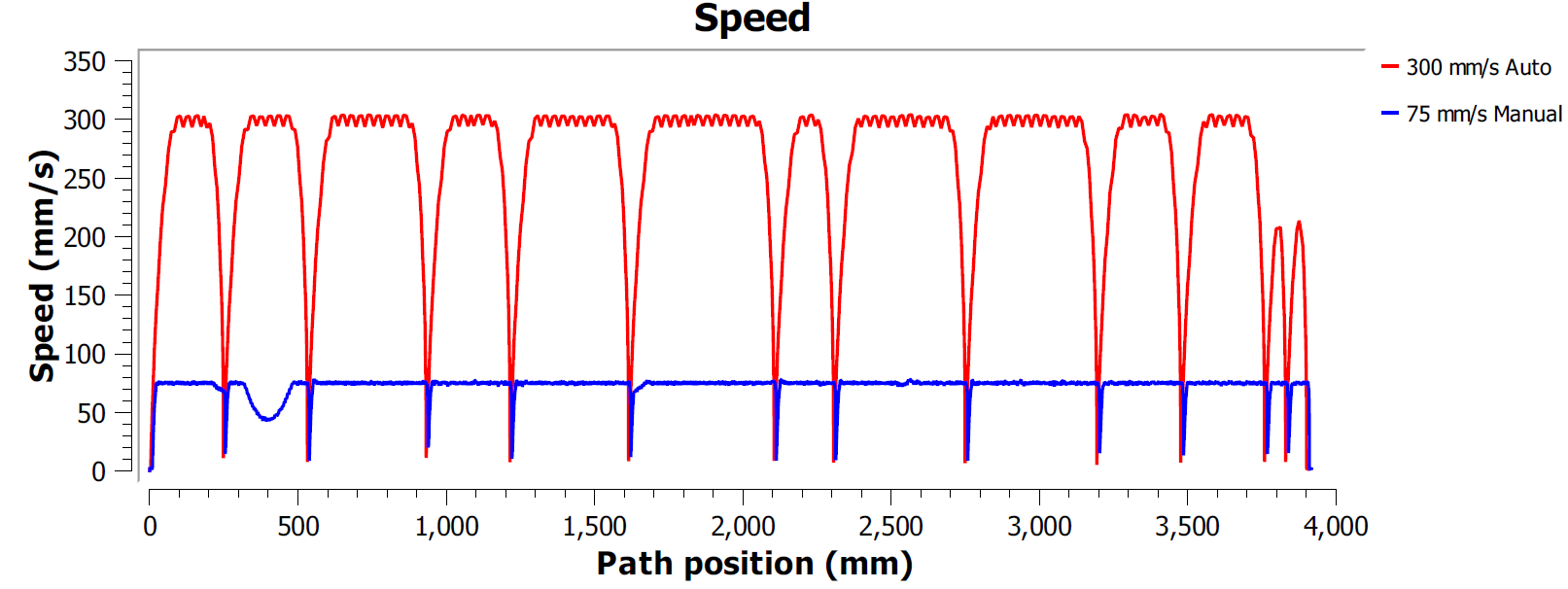
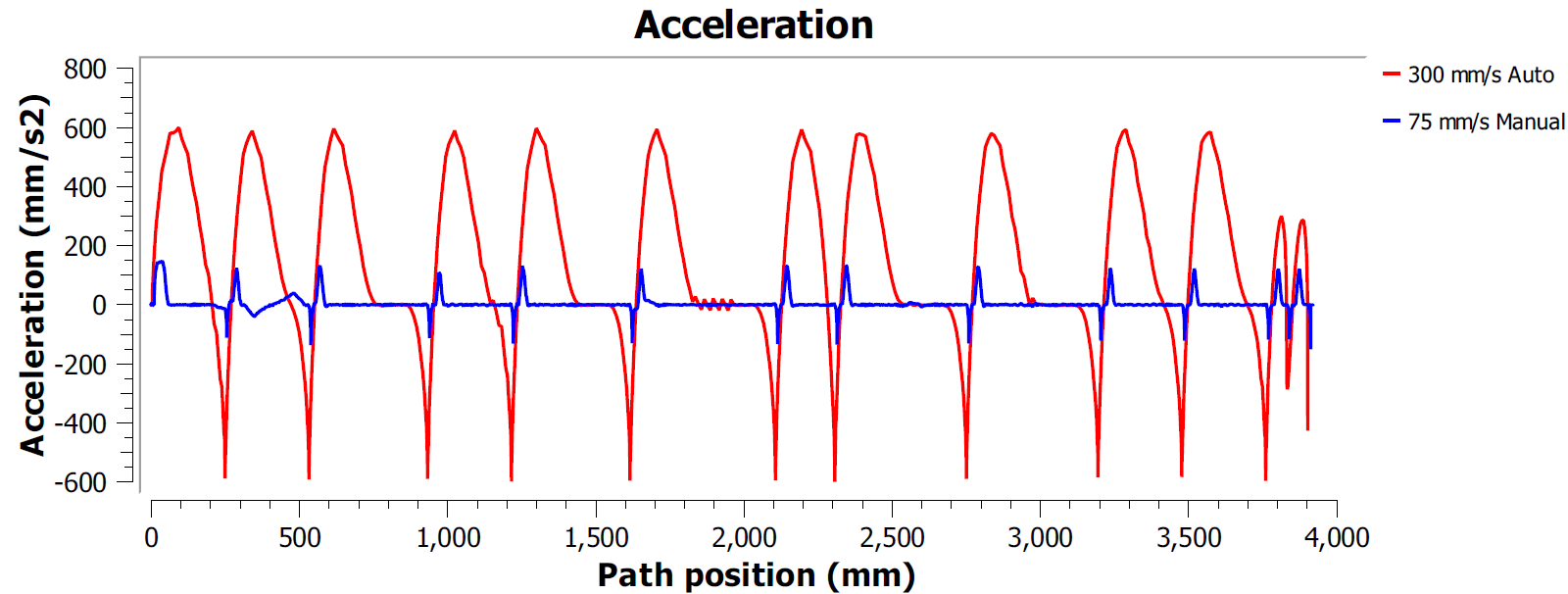
En este ejemplo, ambos programas fueron generados usando la opción Exactitud fina. Esto significa que el robot se detendrá en cada punto para hacer el camino lo más preciso posible. En este caso, es típico observar altas aceleraciones y desaceleraciones a lo largo de la trayectoria debido a que la velocidad debe ser cero al final de cada línea o un movimiento en círculo (esquinas).
La mayoría de las marcas de robots ofrecen opciones de redondeo para evitar este efecto suavizando los bordes. Por ejemplo, ABB lo llama ZoneData y permite especificar una zona de exactitud donde se le permite que el controlador suavice los bordes, Fanuc lo llama CNT y permite especificar un porcentaje de suavizado proporcional a la velocidad, KUKA ofrece la opción de instrucción $ADVANCE con la bandera C_DIS y Robots Universal permite la especificación de un radio de unión para suavizar los bordes.
Por lo tanto, la prueba de precisión de la trayectoria permite encontrar un buen compromiso entre mantener una velocidad suave, mientras se mantienen los niveles de precisión aceptables cerca de los bordes de la trayectoria.
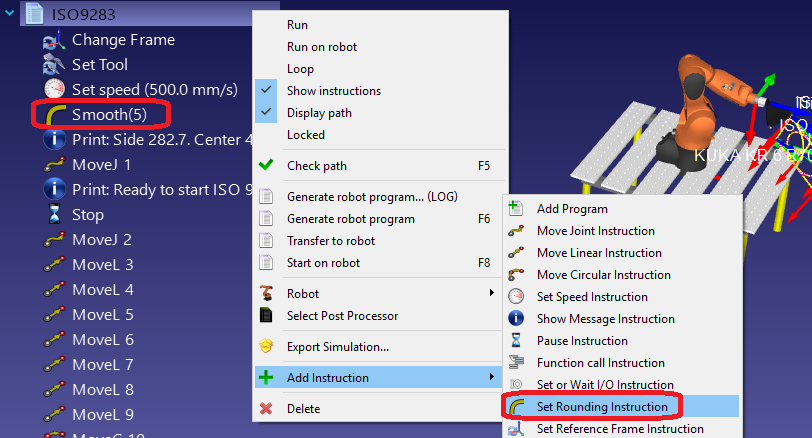
Es posible especificar el parámetro de redondeo en RoboDK, así como la velocidad del programa. Para editar un programa para una prueba de este tipo:
1.Haga clic derecho en el programa
2.Seleccione Mostrar Instrucciones
3.Seleccione la primera o segunda instrucción
4.Seleccione Programa➔Establecer Instrucción de Redondeo para especificar una precisión de redondeo
5.Seleccione Programa➔Establecer Instrucción de Velocidad para especificar la velocidad