ISO9283 Performance Testing
Introducción
El ISO estándar “ISO9283: Manipulación de robots industriales - Criterios de rendimiento y métodos de ensayo relacionados” describe las pruebas para evaluar el desempeño de los robots industriales. Entre otras cosas, se describen algunos procedimientos para medir adecuadamente la precisión de la posición del robot, repetibilidad, así como la precisión de la trayectoria.
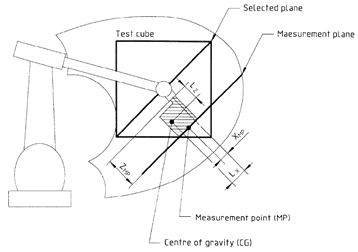
De acuerdo con la norma ISO9283, todas las pruebas deben realizarse dentro del llamado cubo de prueba ISO. El cubo de ensayo ISO se supone que es el cubo más grande que puede caber dentro del espacio de trabajo del robot. Además, la precisión de la posición y repetibilidad deben medirse en cinco configuraciones diferentes 30 veces. Es bien conocido que 5 configuraciones no son suficientes para proporcionar una medición de precisión adecuada para los robots modernos.
La mayoría de los fabricantes de robots sólo proporcionan la precisión posicional del robot si el robot ha sido calibrado, por otra parte, utilizan al menos 100 configuraciones diferentes para proporcionar estadísticas de precisión de posición apropiadas. Los robots industriales son altamente repetitivos pero no precisos; Por lo tanto, la precisión de un robot industrial se puede mejorar a través de la calibración.
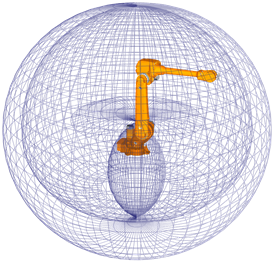
Espacio de trabajo típico del robot en los años 80 Espacio de trabajo típico del robot moderno
Sin embargo, la norma ISO9283 se utiliza a menudo para los ensayos de repetibilidad y precisión de la trayectoria, incluso si el robot no se ha calibrado.

Se recomienda ver el siguiente video que muestra las pruebas de precisión de la trayectoria con RoboDK: https://youtu.be/yMQjqAQY1iE.
RoboDK también se puede utilizar para calibrar los robots, así como para poner a prueba su rendimiento antes y después de la calibración. Finalmente, RoboDK también se puede utilizar para probar la precisión del robot antes y después de la calibración a través de pruebas Ballbar.
Requerimientos
Los siguientes elementos son necesarios para instalar RoboDK y llevar a cabo todas las pruebas de precisión de la trayectoria del robot:
1.Uno o más brazos robóticos industriales
2.Un sistema de medición: cualquier seguidor láser tales como Leica, API o Faro y/o CMM óptico tal como la cámara estéreo C-Track de Creaform pueden funcionar
3.El software RoboDK debe ser instalado y es requerida una licencia apropiada para la prueba ISO9283. Para las licencias de red, se requiere una conexión a internet para comprobar la licencia. Para instalar o actualizar RoboDK para una prueba de rendimiento ISO9283:
a.RoboDK descarga desde la sección de descargas
https://robodk.com/download
b.Configurar el controlador para el sistema de medición (no requerido para Óptica Creaform CMM).
Descomprimir y copiar la carpeta correspondiente:
Laser Tracker API: https://robodk.com/downloads/private/API.zip
Laser Tracker Faro: https://robodk.com/downloads/private/Faro.zip
Laser Tracker Leica: https://robodk.com/downloads/private/Leica.zip
a la carpeta: C:/RoboDK /api/
Configuración Fuera de Línea
Es recomendada la construcción de un entorno virtual de la configuración real en RoboDK (configuración fuera de línea) para preparar la trayectoria y las posiciones para la prueba. Esto se puede hacer antes de tener el robot y el rastreador, usando sólo una computadora con RoboDK instalado. Ejemplos de configuración de calibración y validación de trayectorias en RoboDK pueden ser descargadas de la carpeta:
https://www.robodk.com/downloads/calibration/
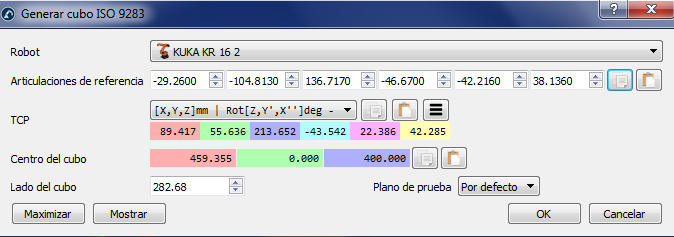
RoboDK tiene una utilidad para generar las configuraciones y la trayectoria recomendada según lo indicado por la norma ISO9283. Para utilizar esta utilidad:
1.Utilidades➔Crear cubo ISO 9283 (objetivos y trayectoria)
2.Introduzca las articulaciones de referencia (posición del robot donde la herramienta se enfrenta al rastreador)
3.Ajuste la posición y el tamaño del cubo
4.Seleccione OK
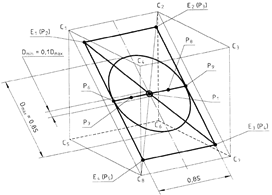
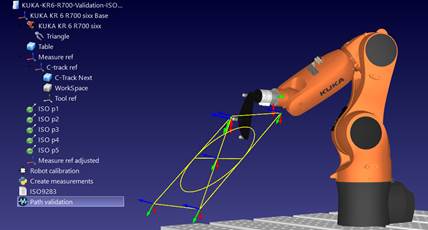
Esto creará los 5 objetivos descritos por la norma ISO, así como la trayectoria recomendada para las pruebas de precisión de la trayectoria. Estos objetivos y el camino se mantienen dentro de un cubo situado en frente del robot. Podemos establecer el lado del cubo deseado, así como mover el centro (objetivo “ISO P1”) y las articulaciones de referencia que definirán la orientación de la trayectoria. También es posible maximizar el tamaño del cubo para encontrar el cubo más grande que cabe en el espacio de trabajo del robot.
Una estación de muestra con la calibración del robot y las opciones de validación del robot es mostrada en la siguiente imagen.
Posición de Precisión y Repetibilidad
El mismo procedimiento que se utiliza para la validación de exactitud de la posición durante la calibración del robot se puede utilizar también para la prueba de exactitud de la posición. Las estadísticas de repetibilidad también se pueden obtener si se toman las mediciones secuencialmente a través del mismo grupo de puntos. La única diferencia entre realizar solamente la validación o calibración y validación es que la primera opción no requiere una licencia de calibración del robot.
Para realizar dichas validaciones se debe seleccionar el menú:
●Utilidades➔Prueba de precisión de posición y repetibilidad (ISO 9283)
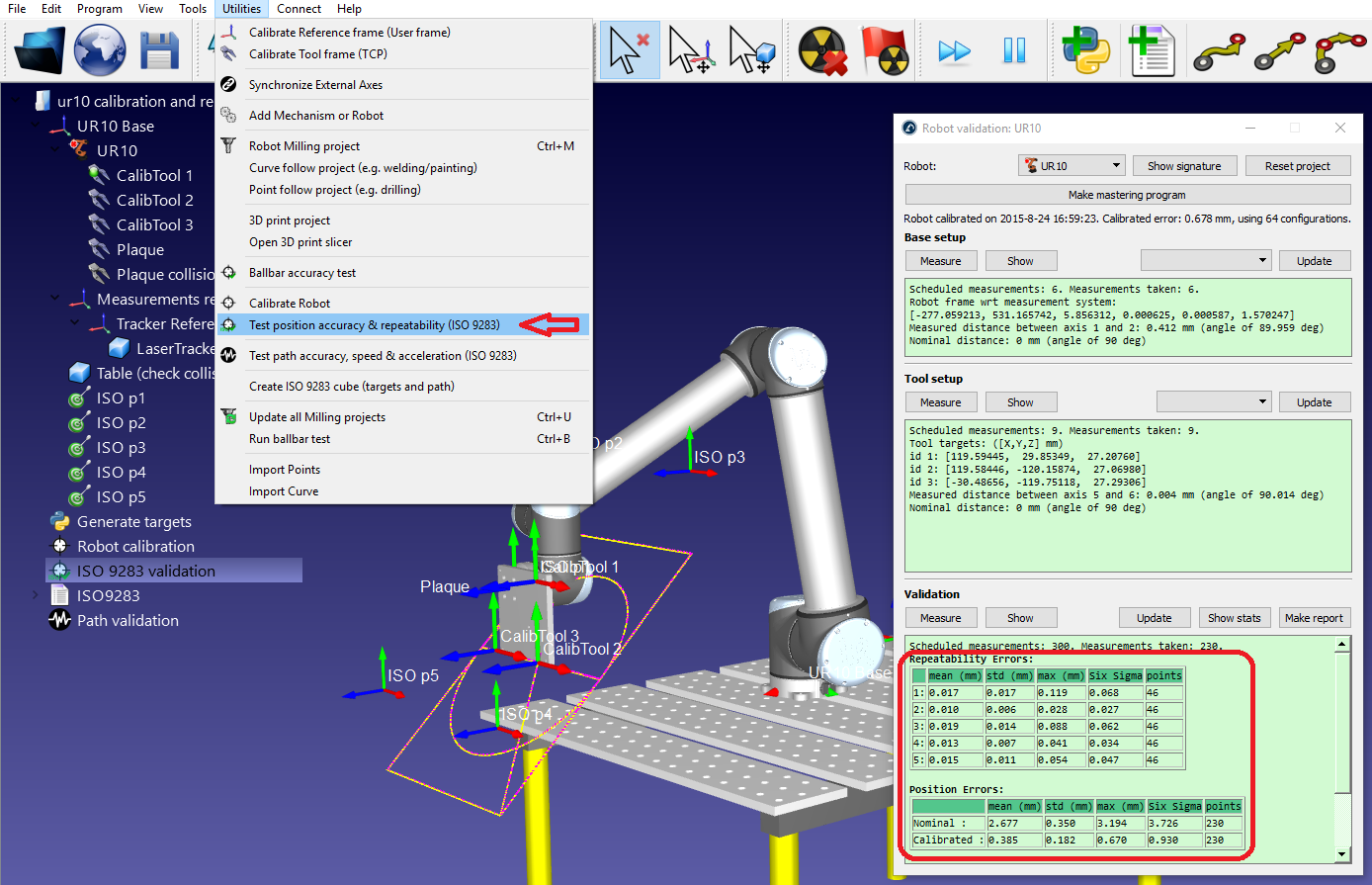
Estas pruebas requieren identificar el sistema base del robot con respecto a las mediciones del sistema de coordenadas (configuración de base) y también el sistema de la herramienta con respecto a la brida de montaje del robot (configuración de la herramienta).
Es posible obtener un reporte PDF cuando se hayan completado las pruebas de posición de precisión y repetibilidad.
Precisión de la Trayectoria
Para llevar a cabo pruebas de precisión de trayectoria, se requiere tener un programa de robot creado con RoboDK, tal como el programa ISO9283 creado por la utilidad Crear cubo ISO. Podemos generar el programa específico del proveedor del robot seleccionando el programa y pulsando F6 (o seleccionando Programa➔Generar Programa...). Alternativamente, es posible usar cualquier otro programa creado en RoboDK (tal como una línea recta, un círculo o un cuadrado).
También es necesario tener un sistema de medición que pueda realizar un seguimiento de la posición del efector final y proporcionar las medidas de posición con respecto a un sistema de coordenadas. Se requiere utilizar la configuración de la base y los procedimientos de configuración de herramientas en RoboDK (requerido para realizar pruebas de calibración o exactitud de la posición) para identificar el sistema base del robot y el sistema de la herramienta.
Los datos de medición deben ser adquiridos mientras se mueve el robot a lo largo del programa. Las mediciones deben ser registradas de forma continua, utilizando el software por defecto proporcionado por el fabricante del sistema de medición. Se requiere exportar las mediciones como un archivo CSV o TXT. Estos archivos deben contener datos de posición XYZ, así como la marca de tiempo para cada medición. Opcionalmente, estas mediciones pueden contener la orientación de la herramienta con respecto a la base del robot.
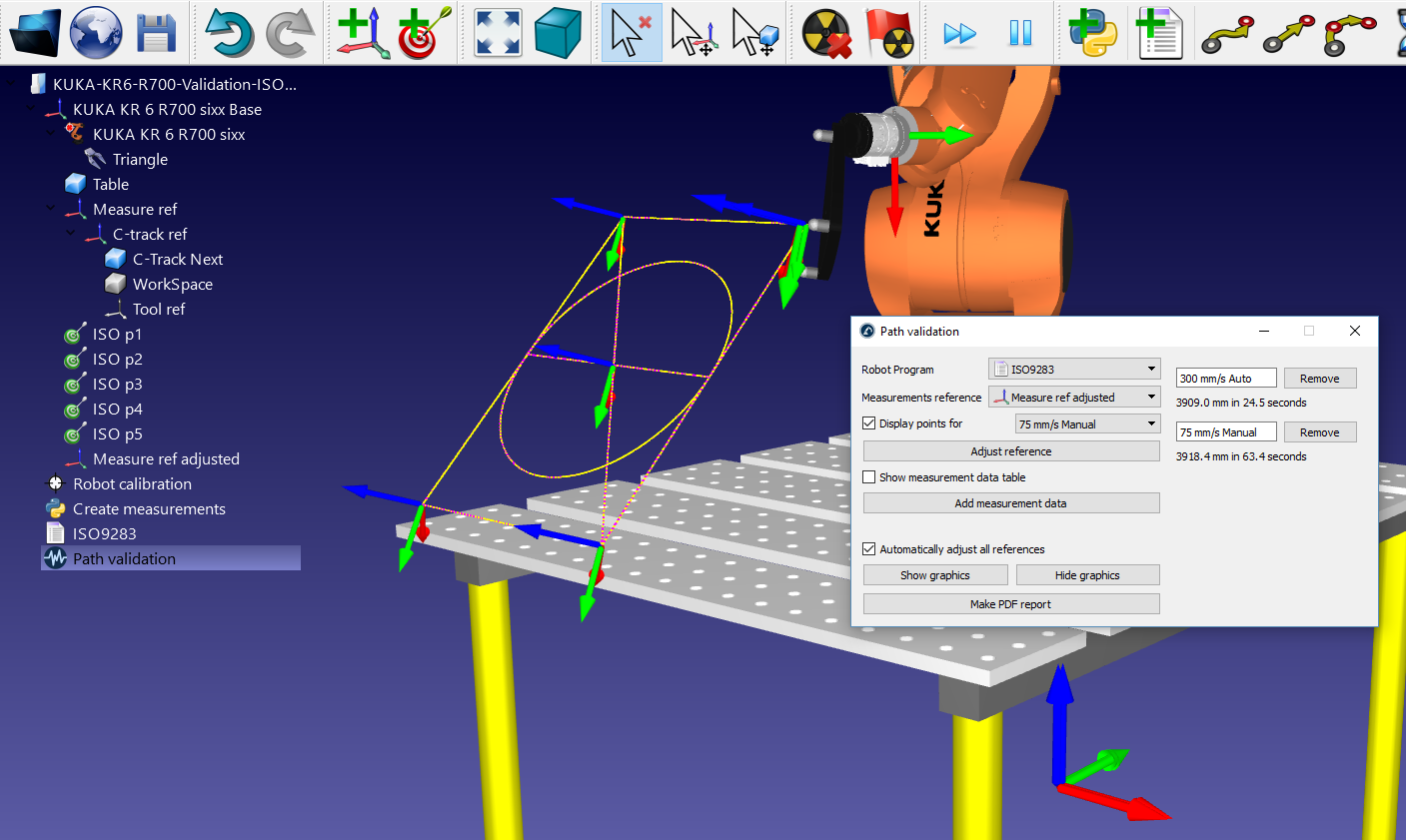
Para iniciar un proyecto de validación de trayectorias en RoboDK:
1.Seleccione Utilidades➔Prueba de la precisión de la trayectoria, velocidad y aceleración (ISO 9283)
2.Seleccione el programa que se utiliza para la validación en el menú desplegable
3.Proporcione el sistema de coordenadas utilizado para las mediciones
4.Importe los datos de medición seleccionando Añadir datos de medición. Alternativamente, es posible arrastrar y soltar los archivos CSV o TXT que contienen las mediciones a la ventana de validación de trayectorias.
Por último, seleccione Crear informe en PDF para generar un PDF con algunas estadísticas y gráficos sobre la precisión de la trayectoria, velocidad y aceleración. Es posible ejecutar la misma prueba más de una vez en condiciones diferentes (diferentes velocidades, diferentes valores de redondeo/punta, diferentes capacidades de carga, ...) para comparar estos parámetros en el mismo informe.
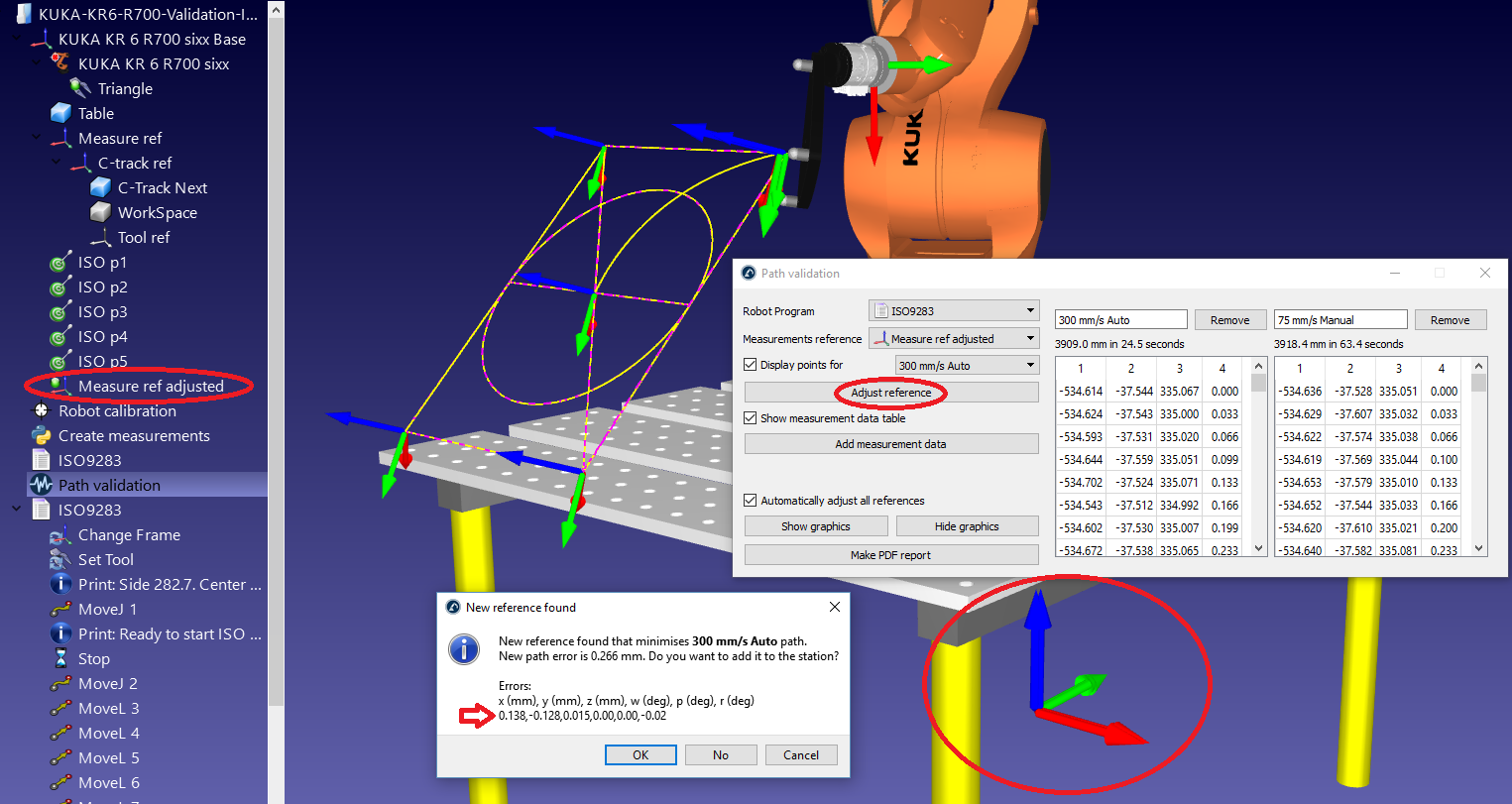
Los puntos de medición pueden visualizarse en violeta. Estas mediciones deben coincidir con la trayectoria amarilla que describe la trayectoria ideal que debe seguir el robot. Las estadísticas proporcionadas por RoboDK son las diferencias entre estos dos caminos.
Si el sistema de coordenadas no se definió adecuadamente los puntos de medición no coincidirán con la trayectoria amarilla. Esto puede ocurrir por varias razones, tales como una definición del sistema de coordenadas incorrecta o una definición de herramienta diferente. En este caso la selección de Ajuste de referencia tratará de adaptarse lo mejor posible a las dos trayectorias de modo que las estadísticas proporcionadas aíslen estos desajustes.
Resultados
Una vez que la prueba de exactitud esté completada es posible obtener un informe PDF seleccionando Crear informe en PDF, desde la ventana de validación de trayectorias. Esto generará un PDF con algunas estadísticas y gráficos sobre la precisión de la trayectoria, velocidad y aceleración.
Los resultados de la prueba de muestra preparada en las secciones anteriores son mostrados en las siguientes imágenes. En este ejemplo, el programa ISO9283 se llevó a cabo en dos modos diferentes:
●Modo manual a 75 mm/s de velocidad
●Modo automático a 300 mm/s de velocidad
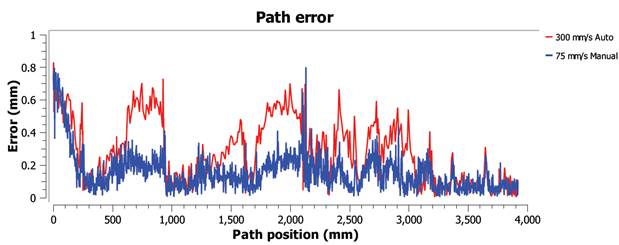
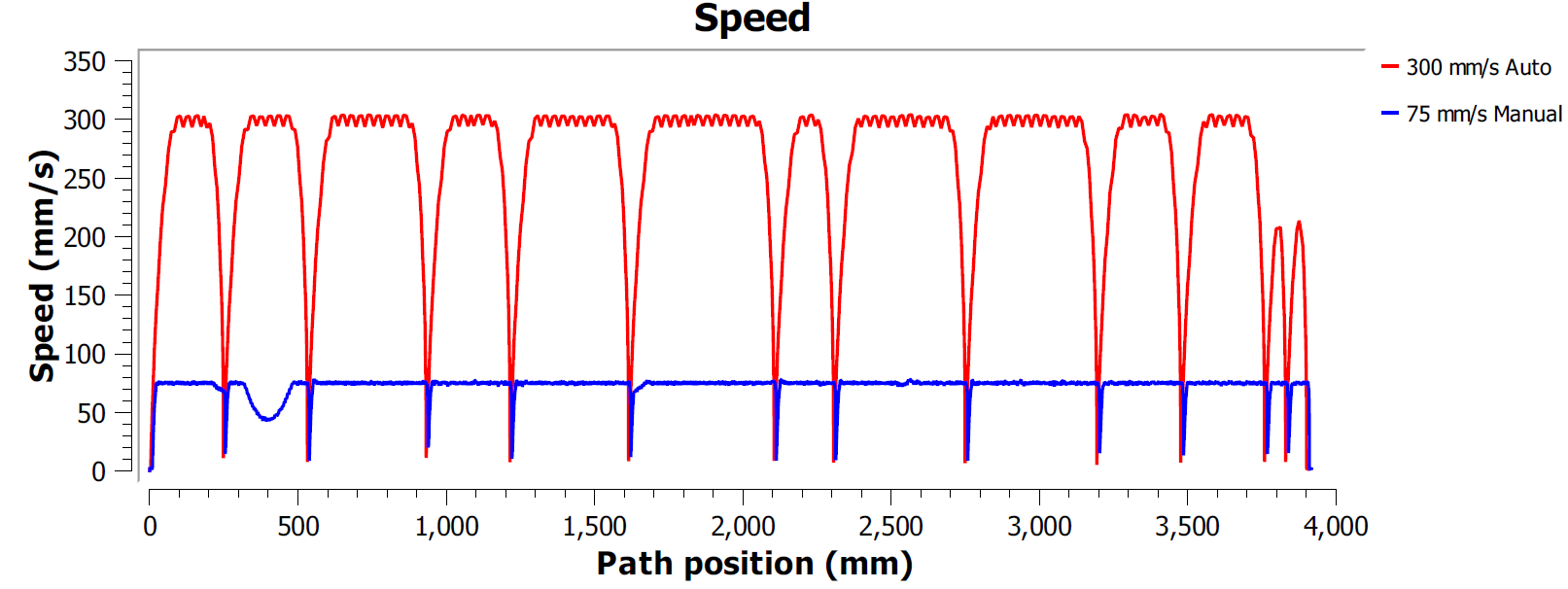
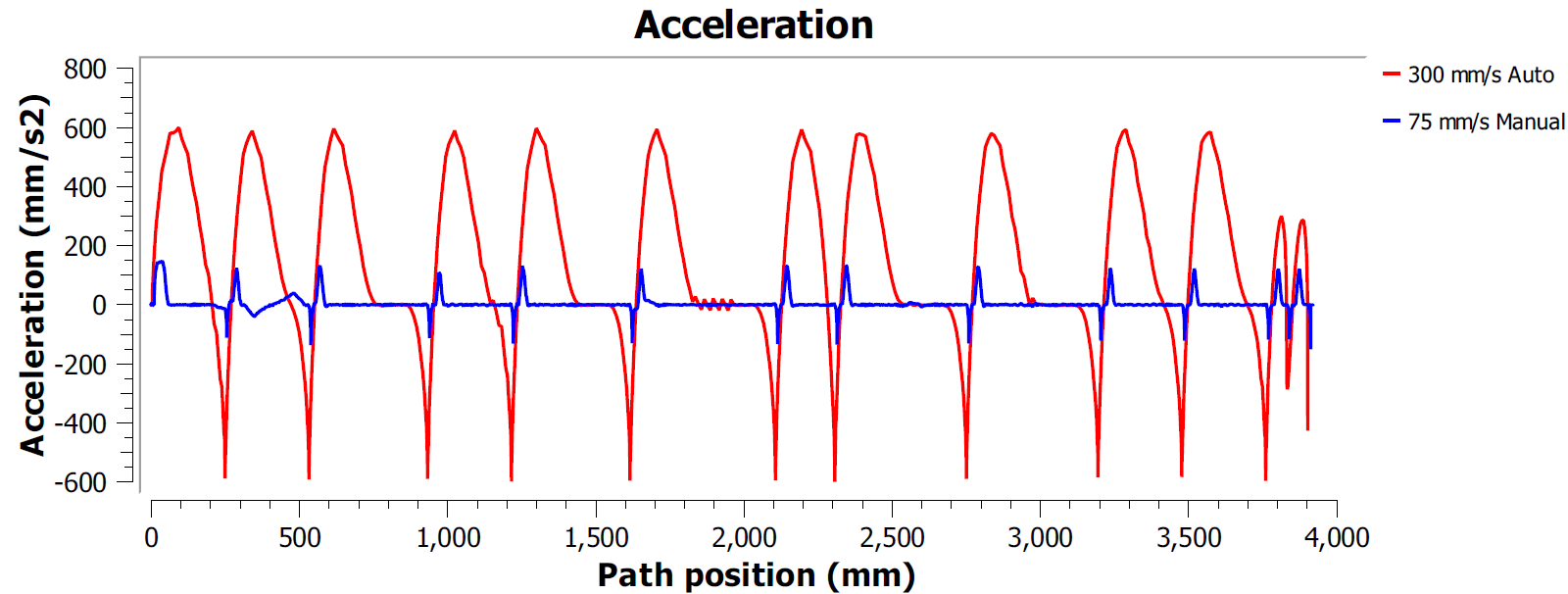
En este ejemplo, ambos programas fueron generados usando la opción Exactitud fina. Esto significa que el robot se detendrá en cada punto para hacer el camino lo más preciso posible. En este caso, es típico observar altas aceleraciones y desaceleraciones a lo largo de la trayectoria debido a que la velocidad debe ser cero al final de cada línea o un movimiento en círculo (esquinas).
La mayoría de las marcas de robots ofrecen opciones de redondeo para evitar este efecto suavizando los bordes. Por ejemplo, ABB lo llama ZoneData y permite especificar una zona de exactitud donde se le permite que el controlador suavice los bordes, Fanuc lo llama CNT y permite especificar un porcentaje de suavizado proporcional a la velocidad, KUKA ofrece la opción de instrucción $ADVANCE con la bandera C_DIS y Robots Universal permite la especificación de un radio de unión para suavizar los bordes.
Por lo tanto, la prueba de precisión de la trayectoria permite encontrar un buen compromiso entre mantener una velocidad suave, mientras se mantienen los niveles de precisión aceptables cerca de los bordes de la trayectoria.
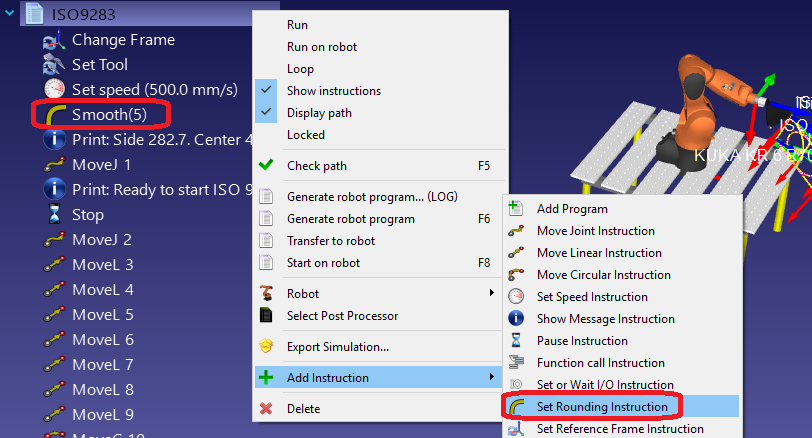
Es posible especificar el parámetro de redondeo en RoboDK, así como la velocidad del programa. Para editar un programa para una prueba de este tipo:
1.Haga clic derecho en el programa
2.Seleccione Mostrar Instrucciones
3.Seleccione la primera o segunda instrucción
4.Seleccione Programa➔Establecer Instrucción de Redondeo para especificar una precisión de redondeo
5.Seleccione Programa➔Establecer Instrucción de Velocidad para especificar la velocidad