Obtener el TCP
Los siguientes pasos permiten crear o modificar herramientas para el robot (TCP, también conocido como tooldata en programación de robot ABB):
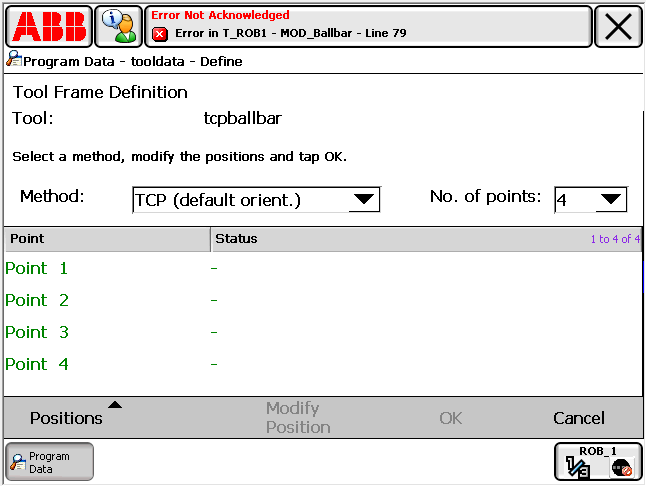
1.Seleccione ABB➔Datos del programa➔tooldata (doble clic)
2.Es posible crear o modificar variables de herramienta existentes
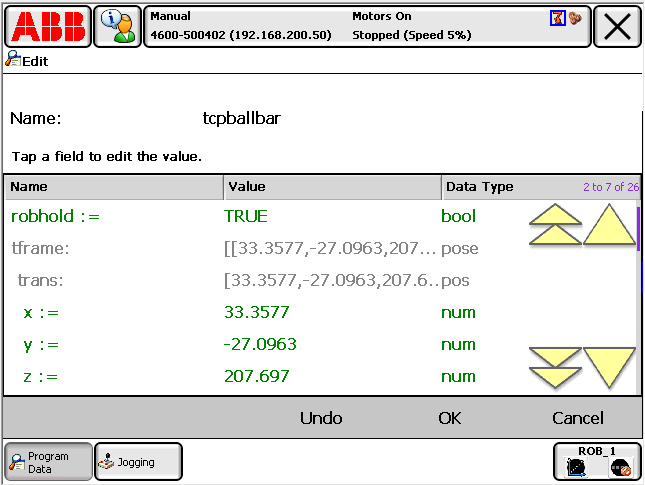
3.Una vez que se ha definido la herramienta se pueden recuperar los valores X, Y, Z del TCP