Robots ABB
RoboDK soporta todos los robots ABB que se programan con lenguaje RAPID, incluyendo los archivos PRG y MOD (controladores IRC5, S4 y S4C). Esta documentación se basa en el controlador robot IRC5 ABB.
Las siguientes secciones muestran operaciones típicas usando el teach pendant del robot ABB para preparar un nuevo programa en RoboDK y transferirlo al robot.
Transferir un programa del robot
Siga estos pasos para cargar un programa (archivo MOD) desde un disco USB:
1.Seleccione ABB➔Program Editor
2.Seleccione Modules, en la parte superior de la pantalla
3.Seleccione File➔Load Module (no es importante si perdemos el puntero del programa, o program pointer - PP)
4.Seleccione el archivo MOD desde el disco USB
5.Seleccione OK
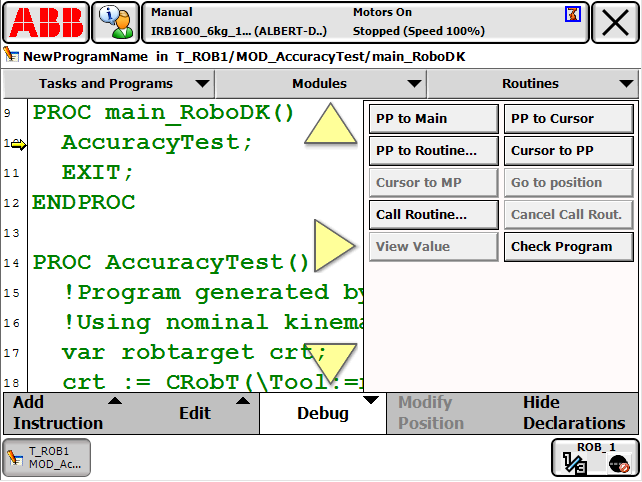
Iniciar un programa de robot
Siga estos pasos para iniciar un programa de robot específico en el controlador del robot ABB:
1.Cambie el interruptor del controlador al modo manual. El mensaje "Manual" debe ser mostrado en la barra de menú superior.
2.Seleccione: ABB➔Program editor➔Debug➔PP to routine
3.Seleccione el programa generado por RoboDK. main_RoboDK es el nombre por defecto.
4.Mantener el interruptor “DeadMan” switch en el teach pendant. El mensaje "Motors On" debe mostrar el estado del robot, así como la luz naranja del robot debería estar encendida.
5.Seleccione el botón de empezar/ejecutar (play) en el teach pendant para iniciar el programa
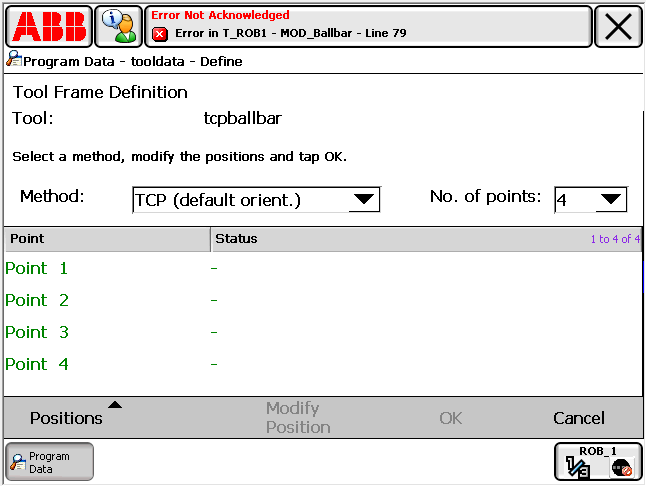
Obtener el TCP
Los siguientes pasos permiten crear o modificar herramientas para el robot (TCP, también conocido como tooldata en programación de robot ABB):
1.Seleccione ABB➔Datos del programa➔tooldata (doble clic)
2.Es posible crear o modificar variables de herramienta existentes
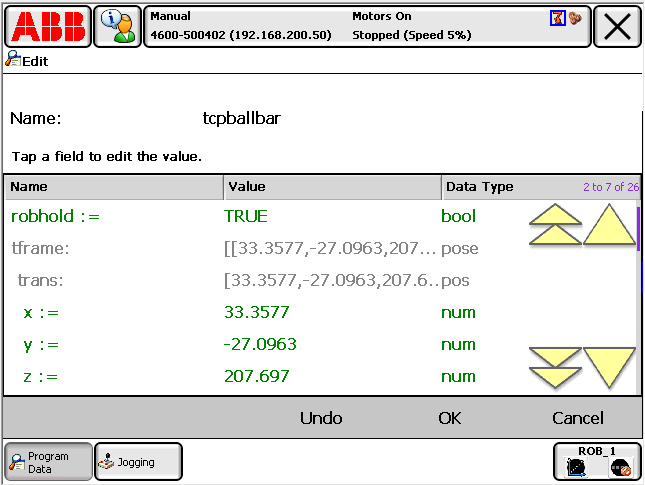
3.Una vez que se ha definido la herramienta se pueden recuperar los valores X, Y, Z del TCP
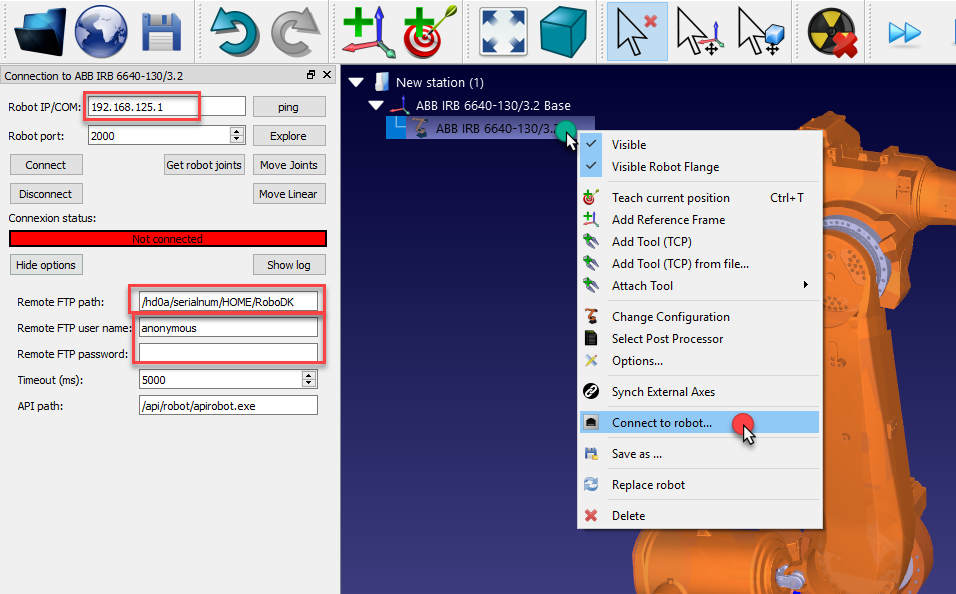
Transferir programas a través de FTP
Los programas pueden ser transferidos fácilmente a través del FTP desde RoboDK para robots ABB.
1.Haga clic derecho en el robot en RoboDK
2.Seleccione Conectar al robot...
3.Introduzca la IP del robot
4.Introduzca la trayectoria FTP remota.
La trayectoria completa puede ser recuperada desde el teach pendant o usando el cliente FTP FileZilla.
5.Introduzca las credenciales de FTP (anónimas por defecto)
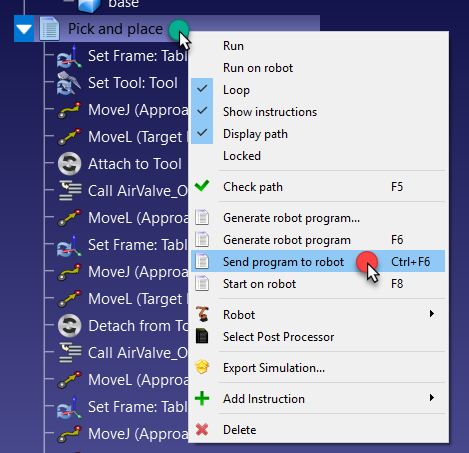
Una vez que un programa RoboDK está listo para ser enviado al robot:
1.Haga clic derecho en un programa en RoboDK
2.Seleccione Enviar programa al robot (Ctrl+F6)
Esto generará el programa e intentará transferirlo al controlador del robot. Una ventana aparecerá mostrando si la transferencia FTP fue exitosa o no.
Cuando los programas sean transferidos a través del FTP necesitan ser cargadas usando la programación RAPID del robot. El siguiente ejemplo se ejecutará en el programa main_RoboDK desde un módulo llamado MOD_Pick_and_place:
MODULE RoboDK_FTP_Run_Program
! Enter the path to a folder with write access rights. Example:
CONST string PATH_ROBODK := "/hd0a/robot-serial-num/HOME/RoboDK";
PERS string ftp_program_loaded := ";
PROC Main()
FTP_Run_Program;
ENDPROC
PROC FTP_Run_Program()
var num module_id := -1;
WHILE module_id <= 0 DO
TPErase;
TPReadNum module_id, "Enter the program to run. For example: to run Prog2 in Module Prog2.mod type 2.";
ENDWHILE
FTP_Run_Program_ID(module_id);
ENDPROC
PROC FTP_Run_Program_ID(num module_id)
VAR string path_module := "";
VAR string mod_to_unload;
IF module_id <= 0 THEN
RETURN;
ENDIF
path_module := PATH_ROBODK + "/Prog" + NumToStr(module_id, 0) + ".mod";
IF StrLen(ftp_program_loaded) > 0 THEN
mod_to_unload := ftp_program_loaded;
ftp_program_loaded := "";
UnLoad mod_to_unload;
ENDIF
Load path_module;
ftp_program_loaded := path_module;
TPWrite "Starting program: " + path_module;
! call the main program from the module sent and loaded
! %"main_RoboDK"%;
! call the numbered program (it should have the same effect)
%"Prog"+NumToStr(module_id,0)%;
TPWrite "Program completed";
ENDPROC
ENDMODULE
Controlador RoboDK para ABB
Los controladores de robots proporcionan una alternativa a la programación fuera de línea (donde un programa es generado, luego es transferido al robot y es ejecutado). Con los controladores de robots, es posible ejecutar una simulación directamente en el robot (Programación en Línea). Más información disponible en la sección de Controladores de Robots.
Una conexión entre RoboDK y el robot ABB puede ser establecida para mover el robot automáticamente desde un PC conectado usando RoboDK. Esto permite usar la opción de RoboDK Ejecutar en el robot para la programación en línea y la depuración. La conexión puede ser establecida a través de una conexión estándar Ethernet (TCP/IP).
Siga estos pasos para configurar el controlador RoboDK para los robots ABB:
1.Establecer una conexión Ethernet entre el computador y el robot.
2.Transferir los archivos RoboDK_Driver.mod y RoboDK_COM.mod al robot (disco USB, transferencia FileZilla FTP o RobotStudio puede ser usado). Deben ser usados como la tarea principal.
3.Siga estos pasos en el teach pendant ABB para cargar el programa desde el teach pendant:
a.Seleccione ABB➔Editor de programas
b.Seleccione Tareas y Programas (en la parte superior)
c.Seleccione Mostrar Módulos (en la parte inferior)
d.Seleccione Archivo➔Módulo de carga... (Seleccionar SI para soltar el puntero del programa)
e.Seleccione el archivo RoboDK_COM.mod y, a continuación, seleccionar OK.
f.Seleccione el archivo RoboDK_Driver.mod y, a continuación, seleccionar OK.
4.Ejecutar el programa Main (encontrará el programa principal/Main en RoboDK_Driver.mod).
CONST string servidorIp := "192.168.125.1";
El puerto de comunicación por defecto para el programa proporcionado es 2000, pero también puede ser cambiado.