Postprocesador
En esta sección se explican algunos consejos relacionados con la generación de programas para robots Brooks.
Punto central de herramientas (TCP)
El punto central de la herramienta (TCP) en RoboDK y en el controlador deben coincidir. Si utiliza un mecanismo de pinza, es necesario añadir un mediante "Añadir herramienta (TCP)" que se encuentre en la posición esperada. El nuevo TCP de la herramienta debe coincidir con el TCP del mecanismo de agarre. Puede encontrar información relacionada con el punto central de la herramienta (TCP) de los robots Brooks PreciseFlex accediendo a la interfaz web y siguiendo estos pasos:
1.Admin
2.Configuración - Base de datos de parámetros
3.Robot
4.Control conjunto/cartesiano
5.Parámetros dinámicos
6.ID de datos 16051
Gripper
Consulte la sección anterior Simulación de la pinza sobre cómo definir correctamente las instrucciones de la pinza compatibles con el postprocesador. Este enfoque define correctamente las ubicaciones en el proyecto GPL, evitando movimientos inesperados de los ejes de la pinza.
Redondeo
Un valor de entrada de -1 determina que el robot se detendrá al final del movimiento y se aplicará una restricción estricta de error de posición (código GPL: prof1.InRange = 100).
Un valor de entrada de 0 determina que el robot se detendrá al final del movimiento, pero se aplicará una pequeña restricción de error de posición (código GPL: prof1.InRange = 10).
Un valor de entrada superior a 0 determina que el robot no se detendrá al final del movimiento y se ejecutará un movimiento de mezcla (código GPL: prof1.InRange = -1).
Velocidad y aceleración
La información relativa a las velocidades/aceleraciones lineales, angulares y de articulación máximas de los robots Brooks PreciseFlex puede encontrarse accediendo a la interfaz web y siguiendo estos pasos:
1.Admin
2.Configuración - Base de datos de parámetros
3.Robot
4.Control conjunto/cartesiano
5.Parámetros dinámicos
6.DataIDs 2700, 2701, 2702 y 2703
El usuario puede establecer las entradas de las instrucciones de velocidad/aceleración de RoboDK utilizando los valores de los DataID anteriores como referencias. A continuación, el postprocesador de Precise utilizará estos valores para calcular la velocidad/aceleración como porcentajes de la velocidad/aceleración máxima de cada robot, tal y como solicita la clase de perfil GPL.
Para cambiar los límites utilizados por el postprocesador, puede modificarlo según el robot específico que esté utilizando. Por defecto, el postprocesador utiliza los límites de los robots PF400 y PF3400. Consulte la sección https://robodk.com/doc/en/Post-Processors.html#PPEditor de la documentación para modificar el postprocesador.
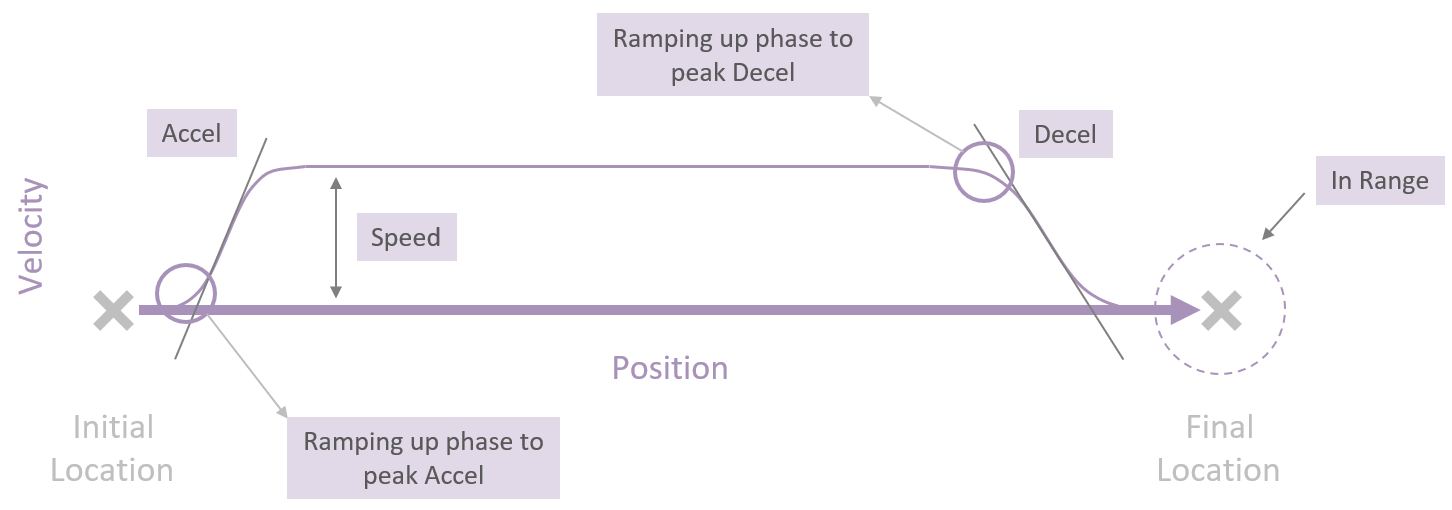
Si se utilizan valores de entrada inferiores a 1 con las instrucciones de aceleración lineal y angular, estas entradas se utilizarán como la duración en segundos de la rampa hasta el pico de aceleración/desaceleración (código GPL: prof1.AccelRamp/prof1.DecelRamp = inputvalue).
La siguiente imagen ofrece más información relacionada con los conceptos escritos anteriormente y cómo el controlador planifica las trayectorias que debe seguir el robot.
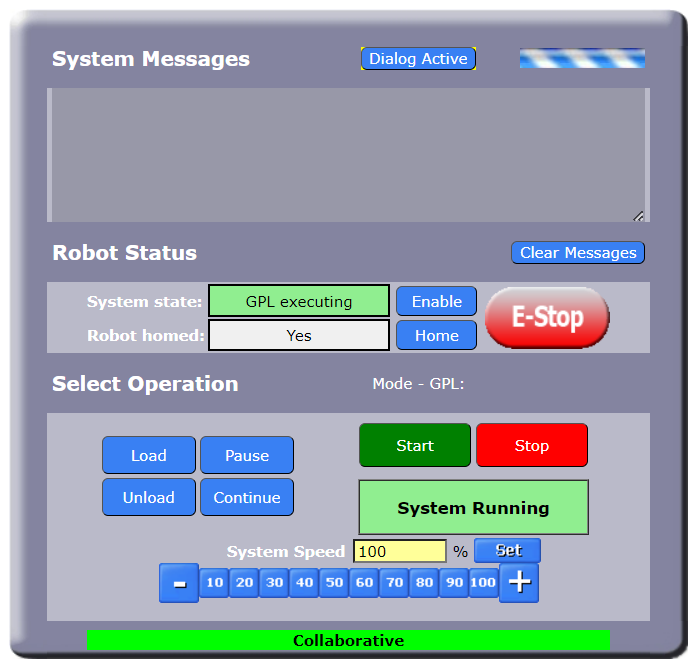
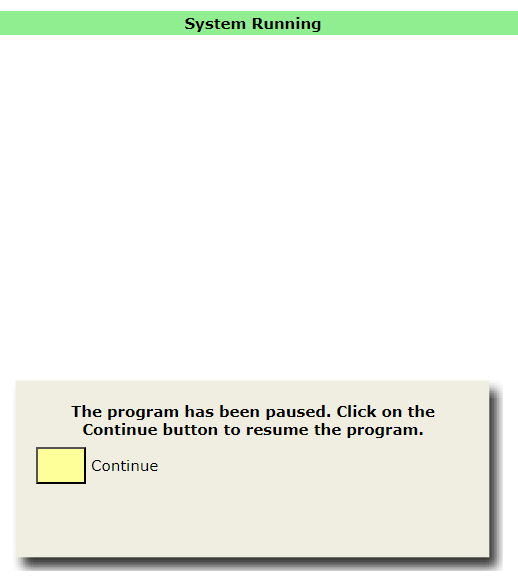
Pausa
Establecer un valor de entrada mayor que 0 generará un comando GPL que pausará el programa durante el tiempo definido por el valor de entrada. Un valor de entrada negativo abrirá un cuadro de diálogo emergente en el Panel de Control del Operador de la Interfaz Web y el programa quedará en pausa hasta que el usuario haga clic en el botón "Continuar" del cuadro de diálogo. Para visualizar el cuadro de diálogo, el usuario debe hacer clic en el botón "Diálogo activo" del Panel de control del operador.