Raíles lineales
Dado que el bastidor base del robot PreciseFlex no se coloca en la base física del robot, se requieren compensaciones específicas entre los robots PreciseFlex y las guías lineales PreciseFlex.
Configuración del raíl lineal Brooks PreciseFlex:
a.Brooks PreciseFlex 400: [118, 0, 45,6, 0, 0, 0]
b.Brooks PreciseFlex 3400: [118, 0, 62,6, 0, 0, 0]
Carril lineal Brooks PreciseFlex -Configuración de 90 grados:
a.Brooks PreciseFlex 400: [101,6, 0, 45,6, 0, 0, 0]
b.Brooks PreciseFlex 3400: [101,6, 0, 62,6, 0, 0, 0]
La guía lineal debe estar sincronizada para que el postprocesador tenga en cuenta la posición del eje. Consulte la sección https://robodk.com/doc/en/General.html#SyncAxes para obtener más información.
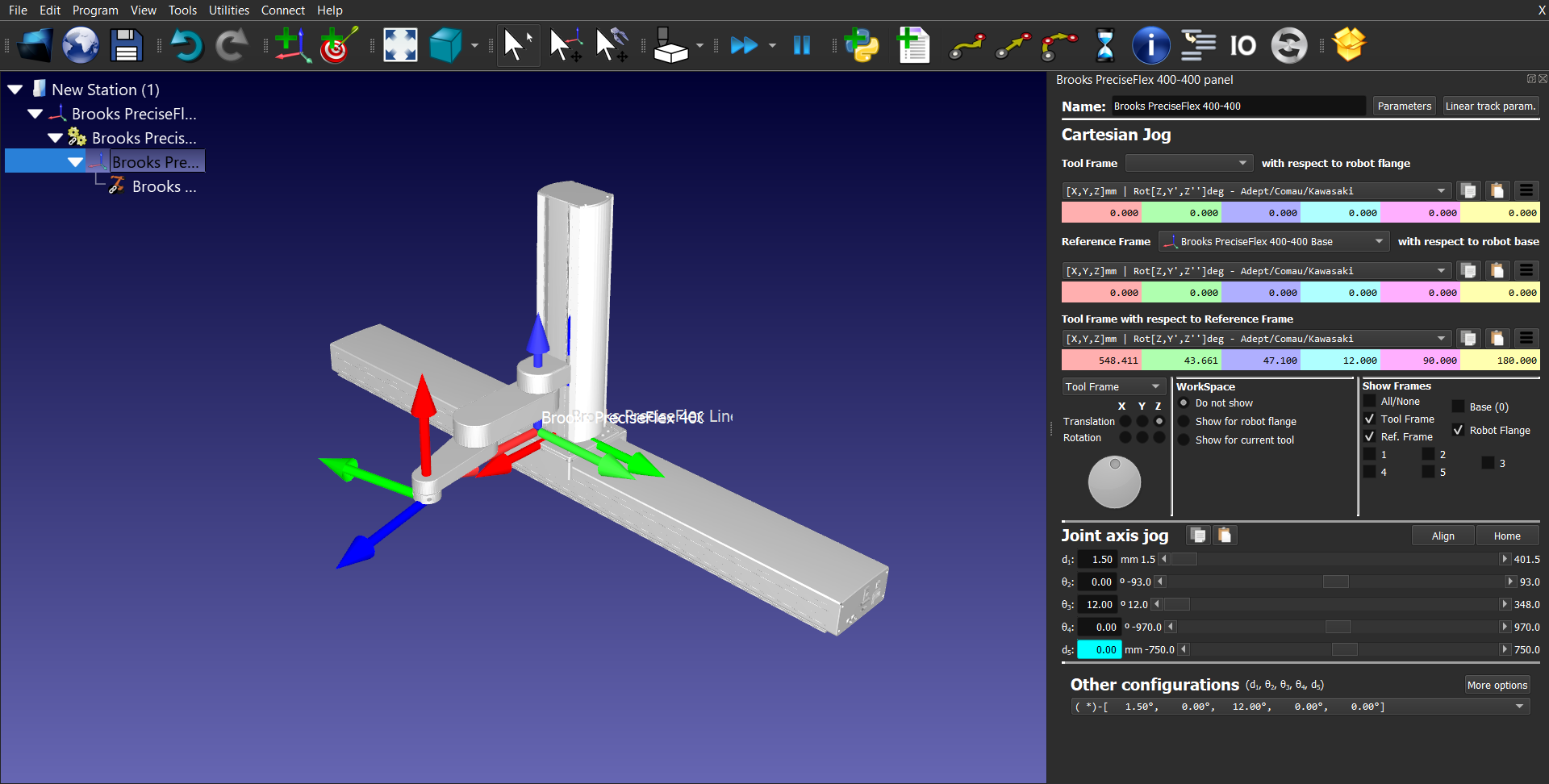
Para guardar correctamente los objetivos en el Sistema de Referencia Mundial del robot y usarlos posteriormente en un proyecto GPL creado mediante el postprocesador, el usuario debe definir un nuevo sistema de referencia. Este debe definirse con respecto al sistema de referencia de la estación, con los mismos desplazamientos utilizados anteriormente entre la base del robot y el raíl lineal (como se indicó anteriormente). Los objetivos deben definirse con respecto a este sistema de referencia.
A continuación se muestra una imagen de un robot PreciseFlex 400 montado en un raíl lineal de 1 m (en configuración de 0 grados) y el sistema de referencia definido como el Sistema de Referencia Mundial del robot.
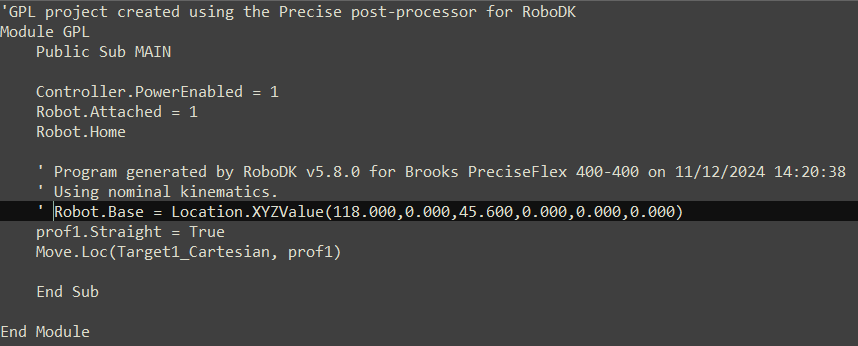
Después de generar el proyecto GPL, abra el archivo Main.gpl con cualquier editor de texto y comente la línea donde se define el sistema de referencia base del robot: