Velocidad y aceleración
La información relativa a las velocidades/aceleraciones lineales, angulares y de articulación máximas de los robots Brooks PreciseFlex puede encontrarse accediendo a la interfaz web y siguiendo estos pasos:
1.Admin
2.Configuración - Base de datos de parámetros
3.Robot
4.Control conjunto/cartesiano
5.Parámetros dinámicos
6.DataIDs 2700, 2701, 2702 y 2703
El usuario puede establecer las entradas de las instrucciones de velocidad/aceleración de RoboDK utilizando los valores de los DataID anteriores como referencias. A continuación, el postprocesador de Precise utilizará estos valores para calcular la velocidad/aceleración como porcentajes de la velocidad/aceleración máxima de cada robot, tal y como solicita la clase de perfil GPL.
Para cambiar los límites utilizados por el postprocesador, puede modificarlo según el robot específico que esté utilizando. Por defecto, el postprocesador utiliza los límites de los robots PF400 y PF3400. Consulte la sección https://robodk.com/doc/en/Post-Processors.html#PPEditor de la documentación para modificar el postprocesador.
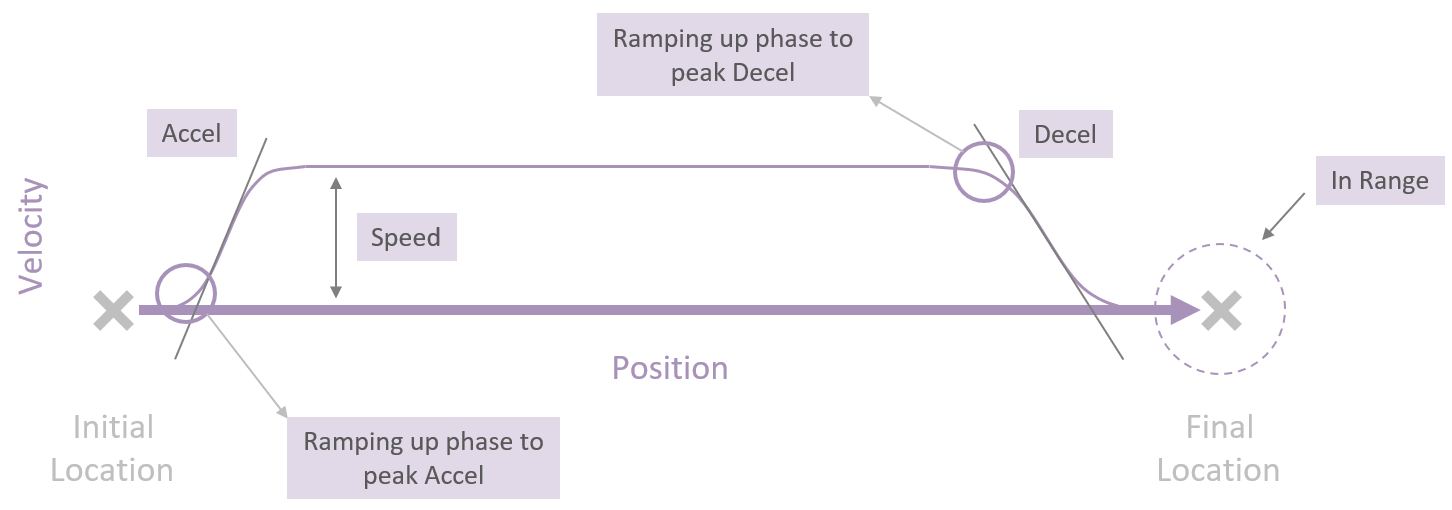
Si se utilizan valores de entrada inferiores a 1 con las instrucciones de aceleración lineal y angular, estas entradas se utilizarán como la duración en segundos de la rampa hasta el pico de aceleración/desaceleración (código GPL: prof1.AccelRamp/prof1.DecelRamp = inputvalue).
La siguiente imagen ofrece más información relacionada con los conceptos escritos anteriormente y cómo el controlador planifica las trayectorias que debe seguir el robot.