Robots Comau
Esta sección de la documentación ofrece una visión general de las operaciones típicas cuando se utiliza un robot Comau, como la generación de programas desde RoboDK y su carga en el controlador del robot Comau.
Transferir un programa de robot
Esta sección le guiará para cargar un programa en el controlador del robot Comau.
Siga estos pasos para cargar un formulario de programa vía FTP en la memoria de programa.
1.En la pestaña de conexión del robot, configure correctamente la dirección IP. Si el nombre de usuario y la contraseña FTP no son los valores predeterminados, puede configurarlos en "más opciones"
2.Cuando desee transferir un programa, simplemente haga clic con el botón derecho en el programa y seleccione "Enviar a robot"
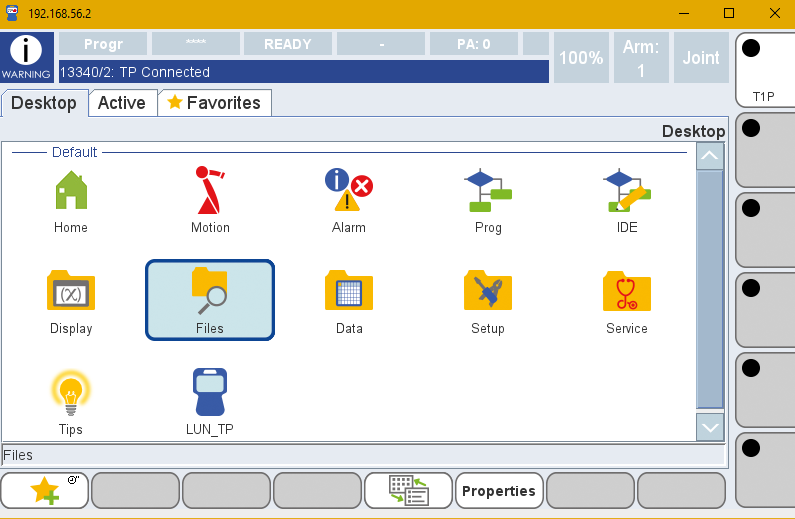
3.En el controlador del robot, navegue hasta "Archivos" en el menú principal de los teach pendants
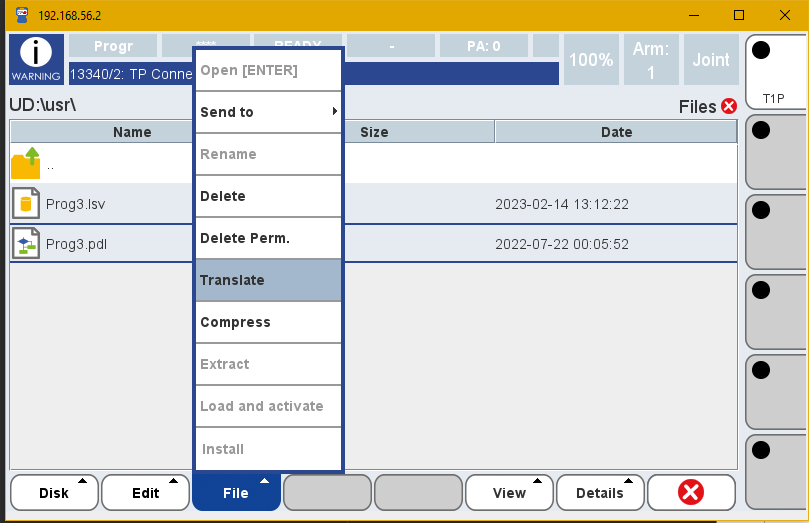
4.Seleccione el programa PDL y su correspondiente LSV si es necesario y haga clic en Archivo->Traducir para convertir el programa a su correspondiente versión compilada.
5.Los archivos compilados pueden cargarse ahora en la memoria y ejecutarse a través de la opción "Prog" de la interfaz principal
Cuando utilice RoboDK con un robot virtual en RoboShop, puede que desee aumentar el número máximo de conexiones FTP simultáneas, de lo contrario, el teach pendant virtual se desconectará cada vez que transfiera un archivo. Para ello, abra un terminal en el robot virtual y realice las siguientes acciones.
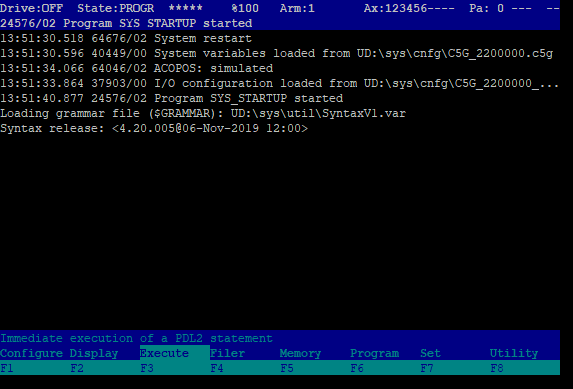
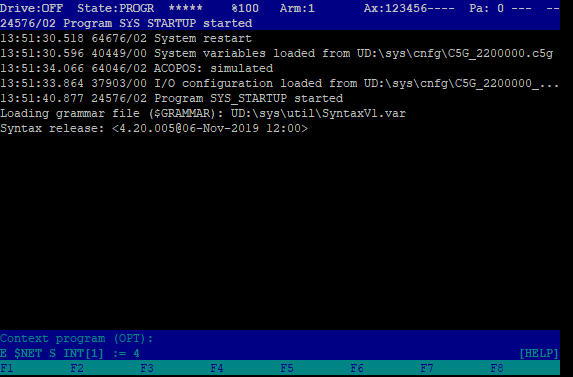
Navegue hasta el terminal en Roboshop y siga estos pasos dentro del terminal del robot:,
1.Seleccione Ejecutar (F3)
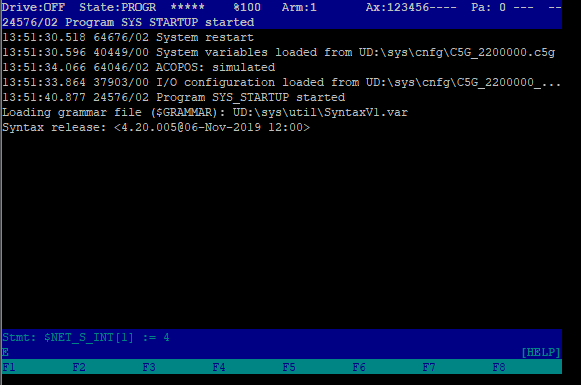
2.Escriba "$NET_S_INT[1] := 4"
3.Pulse "Intro" para confirmar la declaración
4.Pulse "Intro" una segunda vez para ejecutar la sentencia.
Postprocesador
Al generar programas de robot para los robots Comau es importante verificar si su robot está configurado para programas MODAL o NODAL.
Para los programas Nodal, seleccione los siguientes postprocesadores haciendo clic con el botón derecho del ratón sobre el robot y pulsando después el botón "Seleccionar postprocesador".
●Comau Nodal
Para los programas modales, seleccione los siguientes postprocesadores haciendo clic con el botón derecho del ratón sobre el robot y pulsando después el botón "Seleccionar postprocesador", a continuación elija uno de los siguientes postprocesadores:
●Comau C5G
●Juntas Comau C5G
Controlador
Puede utilizar las funciones de programación en línea con los robots Comau. Para que las funciones de programación en línea funcionen, debe configurar el controlador en el lado del controlador del robot Comau ejecutando el archivo de programa PDL del controlador.
Debe seguir estas instrucciones para configurar el controlador Comau para RoboDK:
1.Transfiera el archivo RoboDKdriver.pdl al controlador del robot Comau.
2.Inicie manualmente el programa en el robot (convierte el robot en un servidor).
3.Conéctese al robot desde RoboDK.
El puerto de comunicación utilizado por defecto es el 1102, sin embargo, puede cambiarlo en el archivo RoboDKdriver.pdl.