Controlador RoboDK para Denso
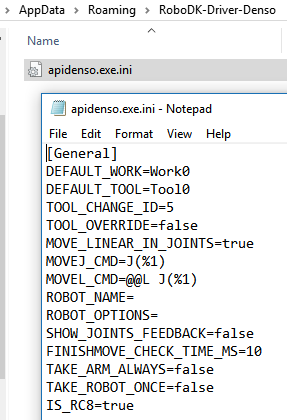
El controlador RoboDK para Denso puede personalizarse al máximo para conseguir un comportamiento específico. Esta personalización puede realizarse editando el archivo ini ubicado en:
%APPDATA%/RoboDK-Controlador-Denso/apidenso.exe.ini
Estas personalizaciones permiten especificar el tipo de movimientos o poder manejar más de un robot al mismo tiempo. Se puede utilizar cualquier editor de texto para modificar este archivo.
Se pueden configurar las siguientes variables:
●DEFAULT_WORK - Objeto de trabajo utilizado por defecto (cadena variable).
●DEFAULT_TOOL - Variable de herramienta utilizada por defecto.
●TOOL_CHANGE_ID - Variable de herramienta de repuesto que se utilizará cuando establezcamos una nueva herramienta (5=Herramienta5 por ejemplo).
●MOVE_LINEAR_IN_JOINTS - Se establece en false para proporcionar movimientos lineales como objetivos cartesianos.
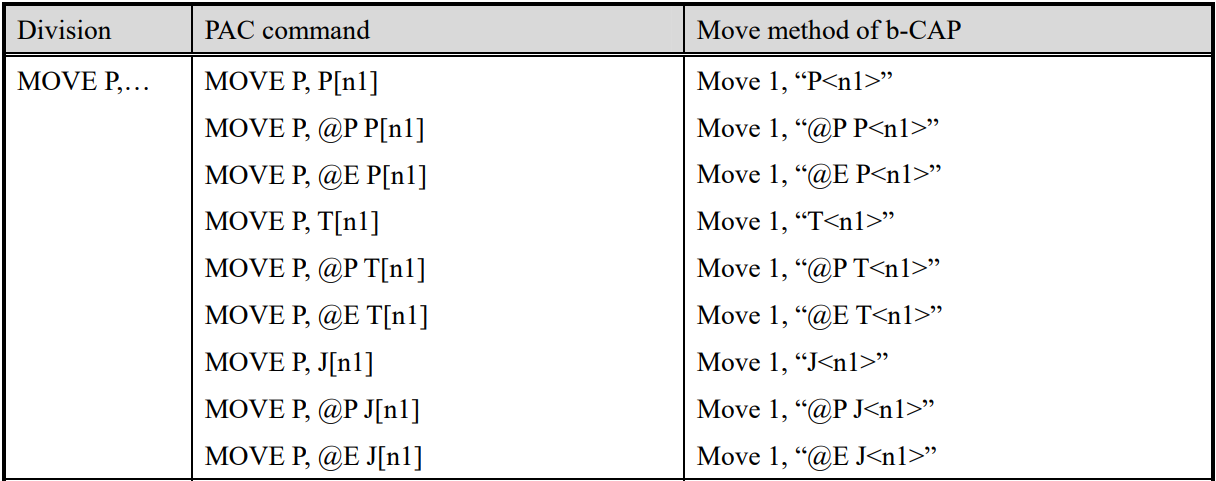
●MOVEJ_CMD - Orden a enviar para un Movimiento Conjunto (MoveJ). La siguiente tabla proporciona las opciones permitidas.
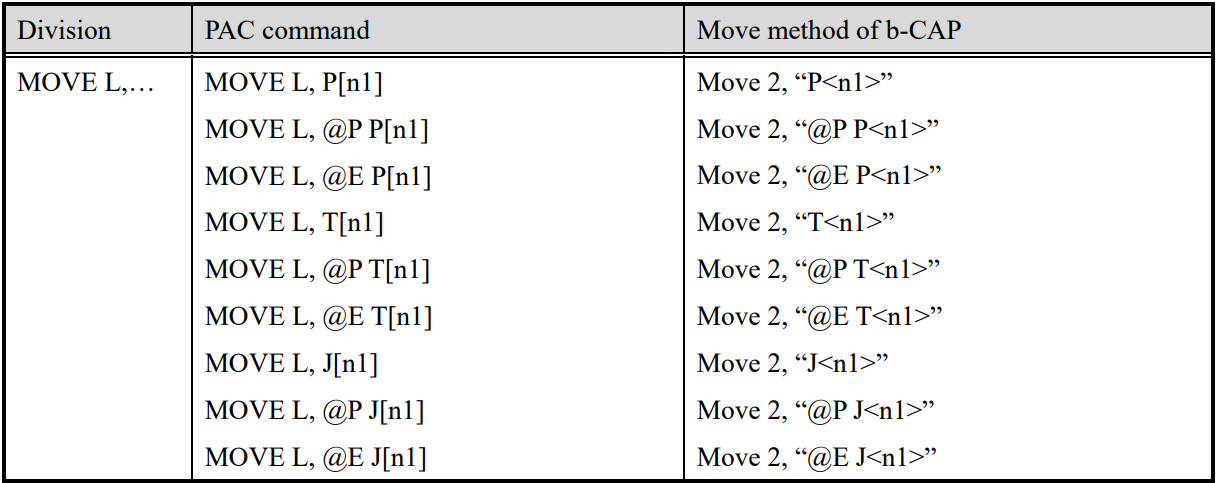
●MOVEL_CMD - Comando a enviar para un Movimiento Lineal (MoveL). La siguiente tabla proporciona las opciones permitidas.
●ROBOT_NAME - Nombre del robot. Especifique este nombre para seleccionar un robot específico de un controlador.
●ROBOT_OPTIONS - Opciones del robot para obtener los recursos del robot. Por ejemplo, si estamos utilizando el robot esclavo del controlador debemos especificar ROBOT_OPTIONS="ID=1". ID debe ser 0 (por defecto) si queremos utilizar el robot maestro (robot principal).
●SHOW_JOINTS_FEEDBACK - Póngalo a true para ver la retroalimentación del robot en la pantalla en tiempo real (el rendimiento puede ser más lento).
●FINISH_MOVE_CHECK_MS - Establece la rapidez con la que debe refrescarse la posición del robot en la pantalla al mostrar la retroalimentación de las articulaciones.
●TAKE_ARMS_ALWAYS - Póngalo a true para mantener los recursos del controlador después de cada movimiento hasta que el robot se desconecte (más rápido pero puede dar lugar a resultados inesperados).
●TAKE_ROBOT_ONCE - Póngalo a true para mantener el recurso del robot después de cada movimiento mientras el robot está conectado (más rápido pero puede dar lugar a resultados inesperados).
●IS_RC8 - Ajustar a false para conectar correctamente con RC7 y controladores Denso más antiguos.