Ejecutar programas desde el PC
Los programas del robot pueden ejecutarse directamente desde RoboDK al robot real si se ha establecido una conexión de red.
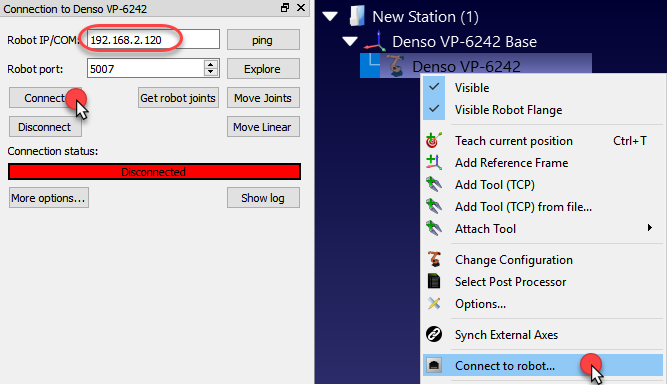
1.Haga clic con el botón derecho en el robot en RoboDK
2.Seleccionar: 
3.Introduzca la IP del robot
4.Seleccione Conectar.
Debería aparecer un mensaje verde indicando Listo si la conexión ha tenido éxito.
El robot puede moverse seleccionando Obtener articulaciones del robot, Mover articulaciones y Mover lineal, en el menú de conexiones.
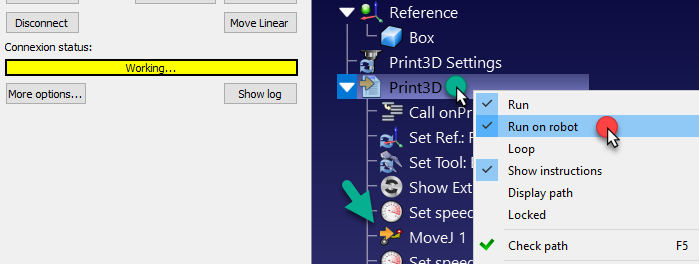
Utilice la opción Ejecutar en el robot para mover el robot mientras mantiene la retroalimentación en RoboDK (Programación en línea). Este método utiliza el robot como servidor y cada instrucción se envía al robot paso a paso a medida que se ejecuta en el simulador. Este método es útil a efectos de depuración.
1.Haga clic con el botón derecho del ratón en el programa (Print3D como se muestra en la siguiente imagen)
2.Seleccione Ejecutar en robot
3.Haga doble clic en el programa para iniciarlo (o haga clic con el botón derecho y seleccione Ejecutar)
Una vez marcada esta opción, se conectará al robot real cada vez que hagamos doble clic en un programa (o clic con el botón derecho del ratón y, a continuación, seleccione Ejecutar).
Estas operaciones también están disponibles en la API de RoboDK y permite integrar la programación de robots con otras aplicaciones. La API está disponible en Python y C# y otros lenguajes de programación.