Robots Denso
RoboDK es compatible con los lenguajes de programación PAC y PacScript utilizados por los robots Denso para la programación fuera de línea. Basta con seleccionar el postprocesador correspondiente y generar el programa del robot
●PAC (controladores RC7 y anteriores)
●PacScript (controladores RC8 y posteriores)
Además, RoboDK también admite la programación en línea para los controladores RC7 y RC8 de Denso. Esto es posible con el controlador predeterminado de RoboDK para Denso. Las versiones anteriores o más recientes también pueden ser parcialmente compatibles.
Este documento proporciona principalmente información relacionada con la utilización de las funciones de programación en línea en los controladores de robot Denso.
Los controladores de robot proporcionan una alternativa a la programación fuera de línea (en la que se genera un programa y, a continuación, se transfiere al robot y se ejecuta). Con los controladores de robot, es posible ejecutar una simulación directamente en el robot (Programación en línea). Encontrará más información en la sección Controladores de robot.
Cómo habilitar el servidor b-Cap
El servidor b-Cap debe estar habilitado para utilizar el controlador de robot de Denso (programación en línea).
Siga estos pasos para habilitar el servidor b-Cap en el lado del robot:
1.Ponga el controlador del robot en modo manual.
2.Seleccione Opción e Introduzca la contraseña 1214 y active la opción ORiN
3.Permitir comunicación Ethernet Menú de configuración de comunicaciones-Permiso-Establecer Lectura/Escritura
4.Establezca el token ejecutable del controlador en Ethernet en el menú de configuración de comunicaciones. Esto permite iniciar programas desde el ordenador.
Ejecutar programas desde el PC
Los programas del robot pueden ejecutarse directamente desde RoboDK al robot real si se ha establecido una conexión de red.
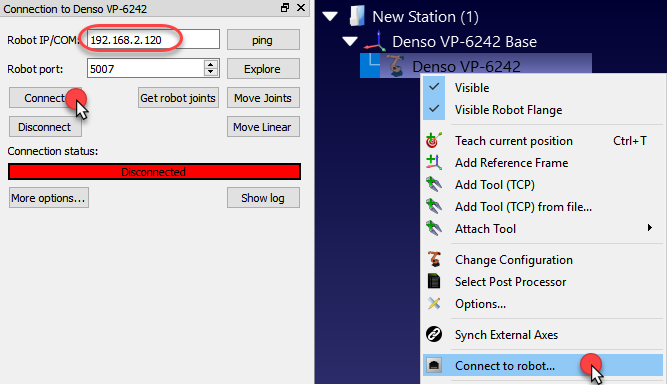
1.Haga clic con el botón derecho en el robot en RoboDK
2.Seleccionar: 
3.Introduzca la IP del robot
4.Seleccione Conectar.
Debería aparecer un mensaje verde indicando Listo si la conexión ha tenido éxito.
El robot puede moverse seleccionando Obtener articulaciones del robot, Mover articulaciones y Mover lineal, en el menú de conexiones.
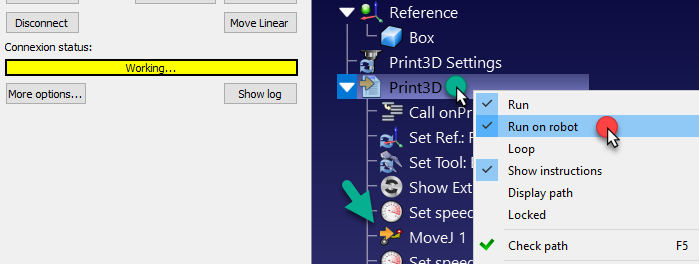
Utilice la opción Ejecutar en el robot para mover el robot mientras mantiene la retroalimentación en RoboDK (Programación en línea). Este método utiliza el robot como servidor y cada instrucción se envía al robot paso a paso a medida que se ejecuta en el simulador. Este método es útil a efectos de depuración.
1.Haga clic con el botón derecho del ratón en el programa (Print3D como se muestra en la siguiente imagen)
2.Seleccione Ejecutar en robot
3.Haga doble clic en el programa para iniciarlo (o haga clic con el botón derecho y seleccione Ejecutar)
Una vez marcada esta opción, se conectará al robot real cada vez que hagamos doble clic en un programa (o clic con el botón derecho del ratón y, a continuación, seleccione Ejecutar).
Estas operaciones también están disponibles en la API de RoboDK y permite integrar la programación de robots con otras aplicaciones. La API está disponible en Python y C# y otros lenguajes de programación.
Controlador RoboDK para Denso
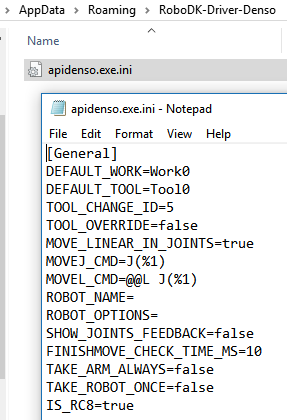
El controlador RoboDK para Denso puede personalizarse al máximo para conseguir un comportamiento específico. Esta personalización puede realizarse editando el archivo ini ubicado en:
%APPDATA%/RoboDK-Controlador-Denso/apidenso.exe.ini
Estas personalizaciones permiten especificar el tipo de movimientos o poder manejar más de un robot al mismo tiempo. Se puede utilizar cualquier editor de texto para modificar este archivo.
Se pueden configurar las siguientes variables:
●DEFAULT_WORK - Objeto de trabajo utilizado por defecto (cadena variable).
●DEFAULT_TOOL - Variable de herramienta utilizada por defecto.
●TOOL_CHANGE_ID - Variable de herramienta de repuesto que se utilizará cuando establezcamos una nueva herramienta (5=Herramienta5 por ejemplo).
●MOVE_LINEAR_IN_JOINTS - Se establece en false para proporcionar movimientos lineales como objetivos cartesianos.
●MOVEJ_CMD - Orden a enviar para un Movimiento Conjunto (MoveJ). La siguiente tabla proporciona las opciones permitidas.
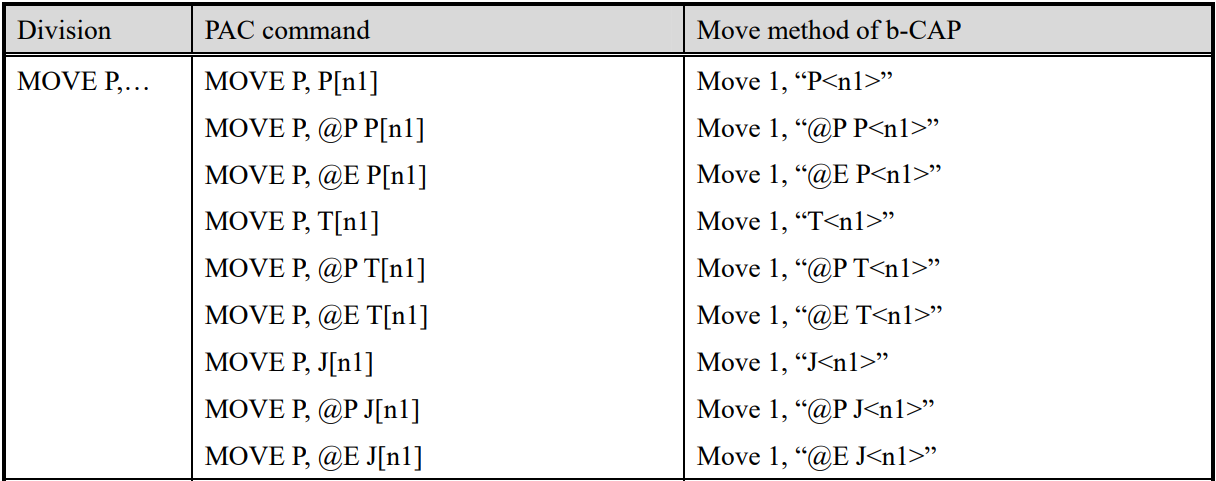
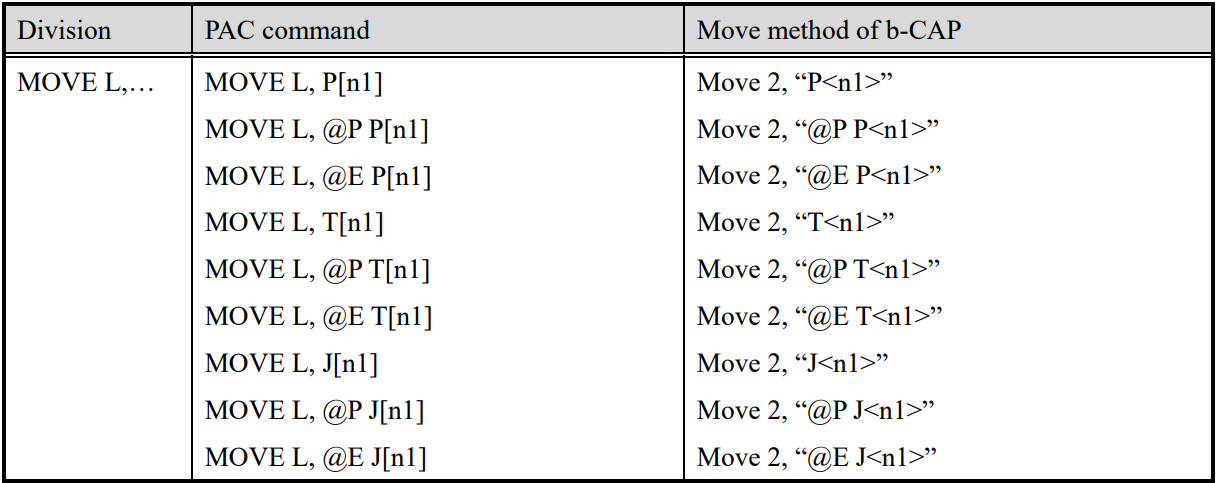
●MOVEL_CMD - Comando a enviar para un Movimiento Lineal (MoveL). La siguiente tabla proporciona las opciones permitidas.
●ROBOT_NAME - Nombre del robot. Especifique este nombre para seleccionar un robot específico de un controlador.
●ROBOT_OPTIONS - Opciones del robot para obtener los recursos del robot. Por ejemplo, si estamos utilizando el robot esclavo del controlador debemos especificar ROBOT_OPTIONS="ID=1". ID debe ser 0 (por defecto) si queremos utilizar el robot maestro (robot principal).
●SHOW_JOINTS_FEEDBACK - Póngalo a true para ver la retroalimentación del robot en la pantalla en tiempo real (el rendimiento puede ser más lento).
●FINISH_MOVE_CHECK_MS - Establece la rapidez con la que debe refrescarse la posición del robot en la pantalla al mostrar la retroalimentación de las articulaciones.
●TAKE_ARMS_ALWAYS - Póngalo a true para mantener los recursos del controlador después de cada movimiento hasta que el robot se desconecte (más rápido pero puede dar lugar a resultados inesperados).
●TAKE_ROBOT_ONCE - Póngalo a true para mantener el recurso del robot después de cada movimiento mientras el robot está conectado (más rápido pero puede dar lugar a resultados inesperados).
●IS_RC8 - Ajustar a false para conectar correctamente con RC7 y controladores Denso más antiguos.