Compilación del Programa (LS vs. TP)
Este sección explica la diferencia entre los archivos de programa Fanuc LS y TP y cómo se compilan automáticamente programas para robots Fanuc usando RoboDK.
Es requerido un archivo binario para ejecutar los programas en los robots Fanuc (TP, también conocido como TPP). Los programas para robots Fanuc generados por software de programación fuera de línea (como RoboDK) están en formato LS (ASCII, texto legible y no compilado). Hay dos opciones para convertir los programas de robot LS a programas TP:
1.Tenga la opción de software Descargar ASCII en el robot. Esta opción puede estar disponible en el robot. La mejor manera de comprobar si esta opción está disponible es proporcionar un archivo LS al robot y debe ser convertido automáticamente a un archivo TP. Por ejemplo, colocar el archivo en el disco FR y seleccionar Cargar en el teach pendant.
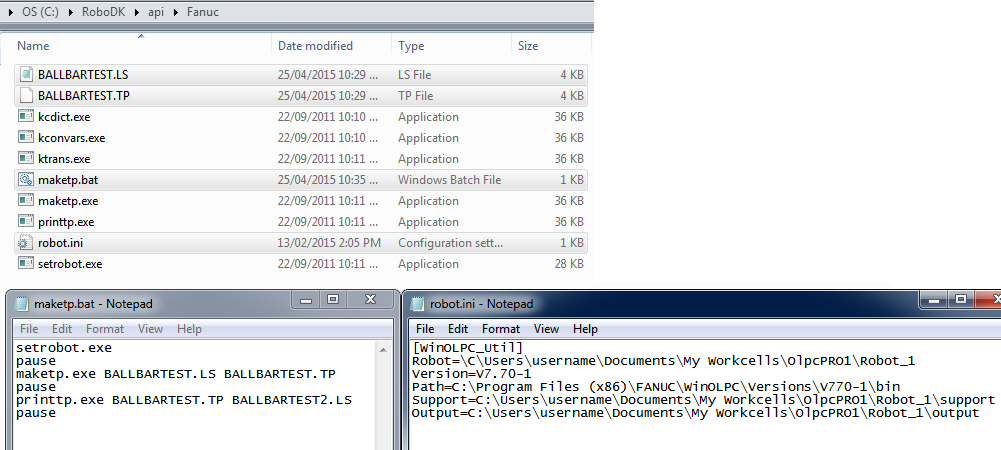
2.Compile el programa usando las herramientas WinOLPC desde Roboguía. En este caso, la misma computadora donde RoboDK está instalado puede compilar el programa LS automáticamente mediante la herramienta de compilación "maketp.exe " de Fanuc. Este comando requiere un archivo « Robot.ini ». Este archivo puede ser generado con la utilidad setrobot.exe desde WinOLPC si la Roboguía fue instalada y una estación de trabajo se guardó en el equipo ("Célula de Trabajo").
Con RoboDK es posible obtener los programas TP automáticamente justo después de que se genera un programa LS. RoboDK maneja las herramientas WinOLPC automáticamente para ser capaz de compilar programas ASCII LS en programas binarios TP.
Estos son los pasos que RoboDK sigue justo después de que un programa LS es generado (usando el post- procesador por defecto):
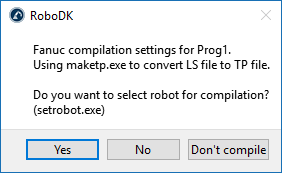
1.La siguiente pantalla aparece por defecto después de generar un programa LS. Es posible seleccionar el robot de una Roboguía "Célula de Trabajo" o simplemente no compilar el programa. Si se selecciona "No", se usará el último archivo "robot.ini”. Si el archivo "robot.ini" no existe, RoboDK ejecutará automáticamente "setrobot.exe" para generar el archivo “robot.ini".
2.El ejecutable maketp.exe es usado para generar el programa TP.
3.Si el archivo TP o el archivo robot.ini no puede ser generado, un mensaje como el que sigue de Robot no establecido aparecerá.
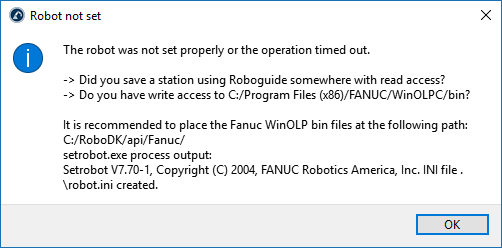
Si aparece este mensaje, es probable que el acceso de lectura/escritura esté limitado a la carpeta WinOLPC por defecto. También podría ser que la Roboguía no se haya instalado correctamente o que nunca se generó en la Roboguía una "célula de trabajo".
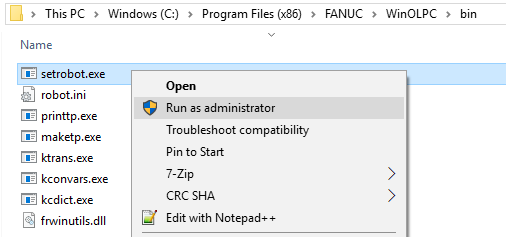
Una forma de resolver los problemas de derechos de acceso es ejecutar manualmente el setrobot.exe como administrador:
1.Abra el explorador de Windows y navegue hasta la carpeta de instalación de WinOLPC:
C:\Archivos de programa (x86) \FANUC\WinOLPC\bin
2.Haga clic derecho Ejecutar como administrador
3.Seleccione la Celda de Trabajo del robot (una Celda de Trabajo de la Roboguía es requerida)
Alternativamente, el contenido de la siguiente carpeta puede ser copiado desde la carpeta predeterminada:
C:\Archivos de Programa (x86) \FANUC\WinOLPC\bin
a la carpeta:
C:\RoboDK\api\Fanuc
Otros post-procesadores podrían comportarse de forma diferente, compilando el programa directamente si las herramientas Fanuc WinOLPC están disponibles en el computador. Para seleccionar un post-procesador diferente, por ejemplo, para soportar los controladores RJ3 de Fanuc:
1.Haga clic derecho en el robot
2.Seleccione Seleccionar el Post-Procesador
3.Seleccione Fanuc RJ3
4.Regenere el programa (F6)
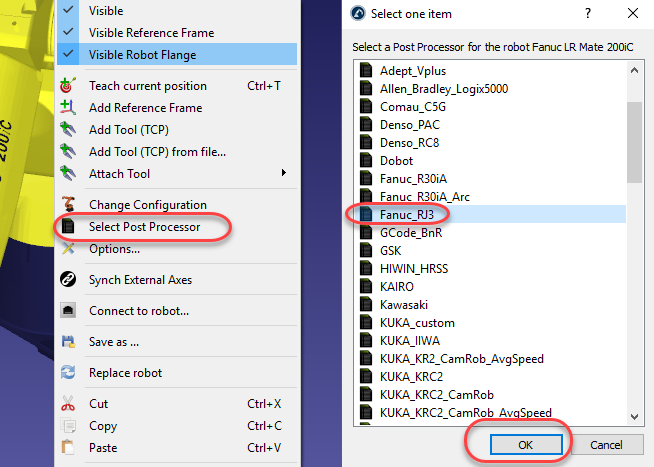
Como es mostrado en la siguiente imagen. Esto permite generar el archivo robot.ini en la misma carpeta donde permanece el ejecutable maketp.exe. Este archivo es requerido para compilar los programas. También es importante guardar la Roboguía de la Célula de trabajo en una carpeta legible por todos los usuarios que deben compilar programas.
Una vez que los archivos hayan sido colocados en la carpeta correcta, es posible probar la compilación seleccionando Establecer Robot Fanuc, como es mostrado en la siguiente imagen (menú: Herramientas➔Opciones➔Programa).
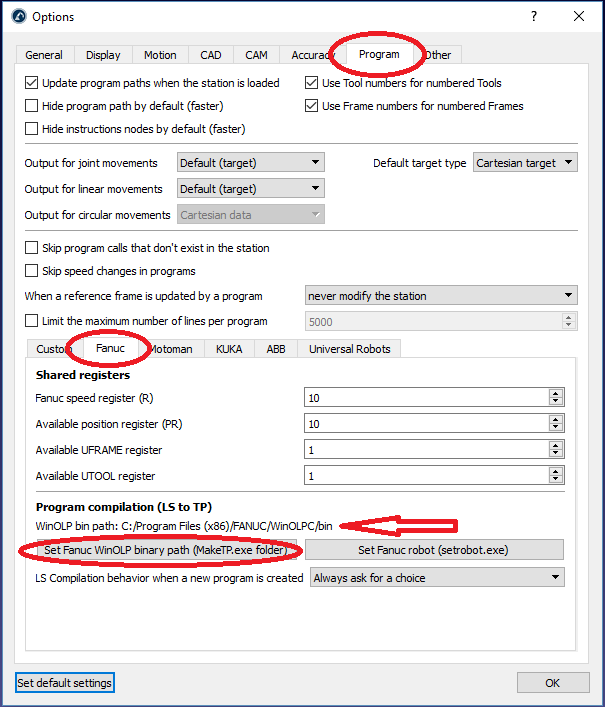
Es posible definir en esta ventana cuáles registros serán usados por el post-procesador predeterminado para generar los programas de robot Fanuc.
Alternativamente, los procesadores personalizados pueden ser usados para personalizar de mejor manera todas estas operaciones. Dos procesadores personalizados se proporcionan por defecto con el paquete RoboDK para los robots Fanuc (denominado Fanuc_R30iA y Fanuc_RJ3).
Los procesadores RoboDK para robots Fanuc soportan la utilización de robots de 6 ejes sincronizados con ejes externos como tabla giratoria o rieles lineales.