Recuperando articulaciones del robot
Siga estos pasos para recuperar las articulaciones del robot:
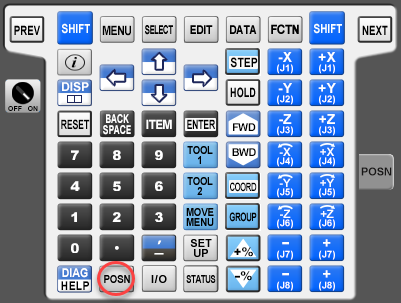
1.Seleccione POSN (botón en el teach pendant) para ver la posición actual del robot
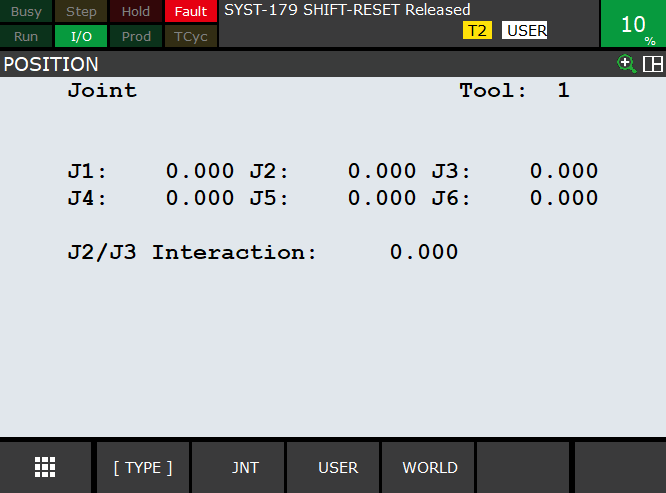
2.Select JNT en la pantalla o seleccione COORD (botón en el teach pendant) para seleccionar el modo de las articulaciones.