Transferir un programa de robot
Debemos seguir estos pasos para cargar un programa desde un dsipositivo USB:
1.Conecta el dispositivo USB en el teach pendant
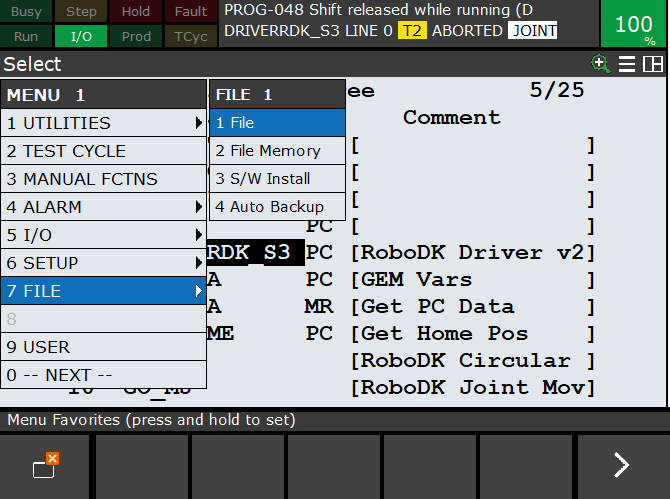
2.Seleccione Menú➔Archivo
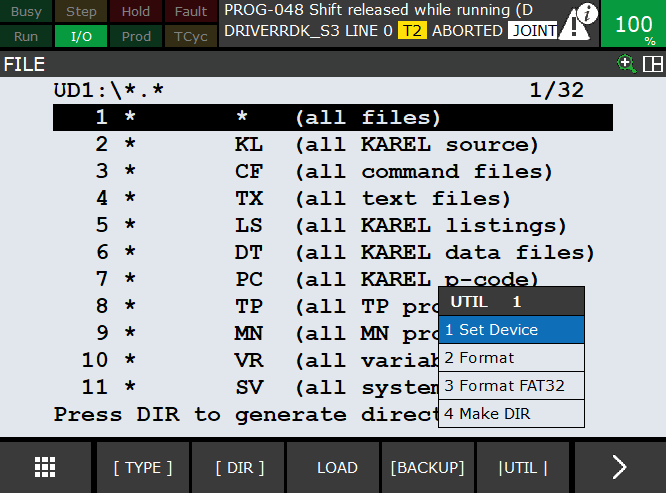
3.Seleccione Utilidades➔Establecer dispositivo➔USB
4.Seleccione DIR
5.Seleccione el archivo de programa TP o LS desde el disco USB (por ejemploBALLBARTEST.TP)
Esto guardará el archivo automáticamente en la memoria del controlador Fr
6.Seleccione el programa en la memoria Fr y seleccione CARGAR (botón de pantalla)
Importante: La opción Descargar ASCII es necesaria para la programación fuera de línea. Esto permite cargar archivos LS directamente al controlador. Alternativamente, los programas LS (archivos ASCII) pueden ser compilados a los programas TP (archivos binarios) desde la PC usando las herramientas WinOLPC de Fanuc’s (HacerTP).
Importante: La velocidad lineal de los programas creados con RoboDK es definida por el registro R[10] por defecto. Si la velocidad no está establecida en el programa, debe establecerse manualmente. En ese caso:
Seleccione DATOS➔Tipo➔Registro, R[10] = 50 (para una velocidad de 50 mm/s)
Seleccione DATOS➔Tipo➔Registro, R[10] = 50 (para una velocidad de 50 mm/s)