Los robots de Han
Esta sección de la documentación ofrece una visión general del funcionamiento típico de los robots Han que utilizan RoboDK para enviar un programa al controlador Han.
Transferir un programa al controlador de Han
Puede importar manualmente los programas de robot generados desde RoboDK al controlador de robot de su Han.
Debe seguir estos pasos para importar un programa de RoboDK al controlador de Han:
1.Inicie el controlador del Han y conéctese al robot.
2.En RoboDK, haga clic con el botón derecho del ratón en el programa que desea importar y seleccione Generar programa de robot como.....
3.RoboDK le pedirá que guarde dos archivos, uno es un guión línea por línea de los comandos que se enviarán al controlador y el otro un archivo .json que se cargará en el controlador.
4.Seleccione la ubicación en la que desea guardar cada archivo; el archivo .json se puede guardar en un disco USB para importarlo al controlador como un programa.
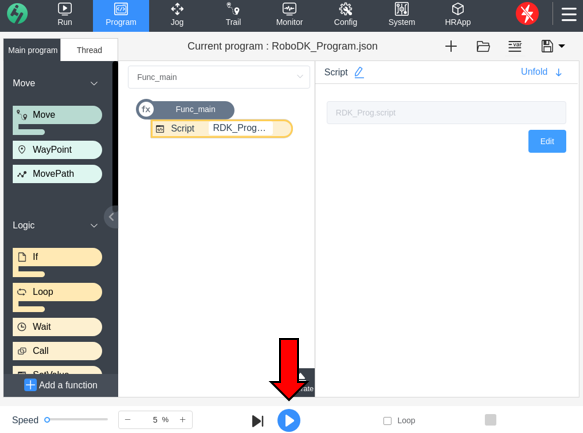
5.En el controlador, vaya a la pestaña Programa.
6.A la derecha del nombre del "Programa actual" hay un icono de carpeta. Seleccione este icono para abrir la lista de archivos del programa.
7.Seleccione el botón "Importar" en la parte inferior de la lista.
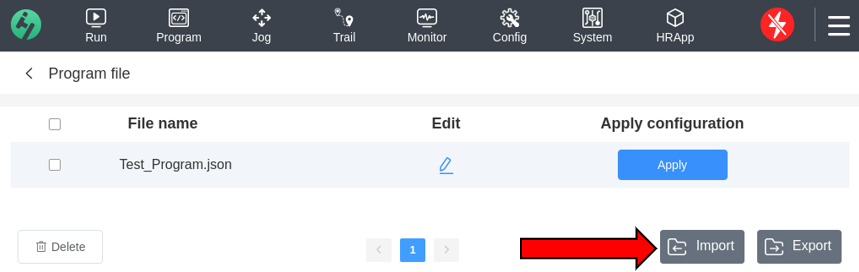
8.Localice el archivo .json generado por RoboDK en el USB y selecciónelo.
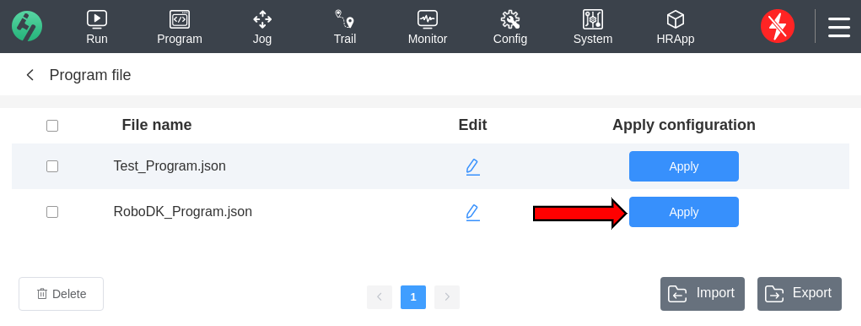
9.Pulse "Aplicar" para establecer el programa importado como programa activo.
10.El programa de RoboDK se importará como una función que llama a un script.
11.Seleccione el botón azul de inicio para empezar a ejecutar el programa en el robot.