Robots Hanwha
RoboDK es compatible con todos los controladores de robots Hanwha. Puede crear simulaciones y programas de robot para Hanwha y también puede mover el robot Hanwha real desde RoboDK utilizando el controlador.
Controlador RoboDK para Hanwha
Los controladores de robot proporcionan una alternativa a la Programación Offline. Con los controladores de Hanwha puede mover un robot directamente desde RoboDK mientras simula su programa (Programación en línea). Más información disponible en la sección Controladores de robot.
Siga los pasos que se indican a continuación para configurar RoboDK para que funcione con los robots de Hanwha.
Paso 1. Configure la dirección IP del robot
1.Inicie sesión como administrador
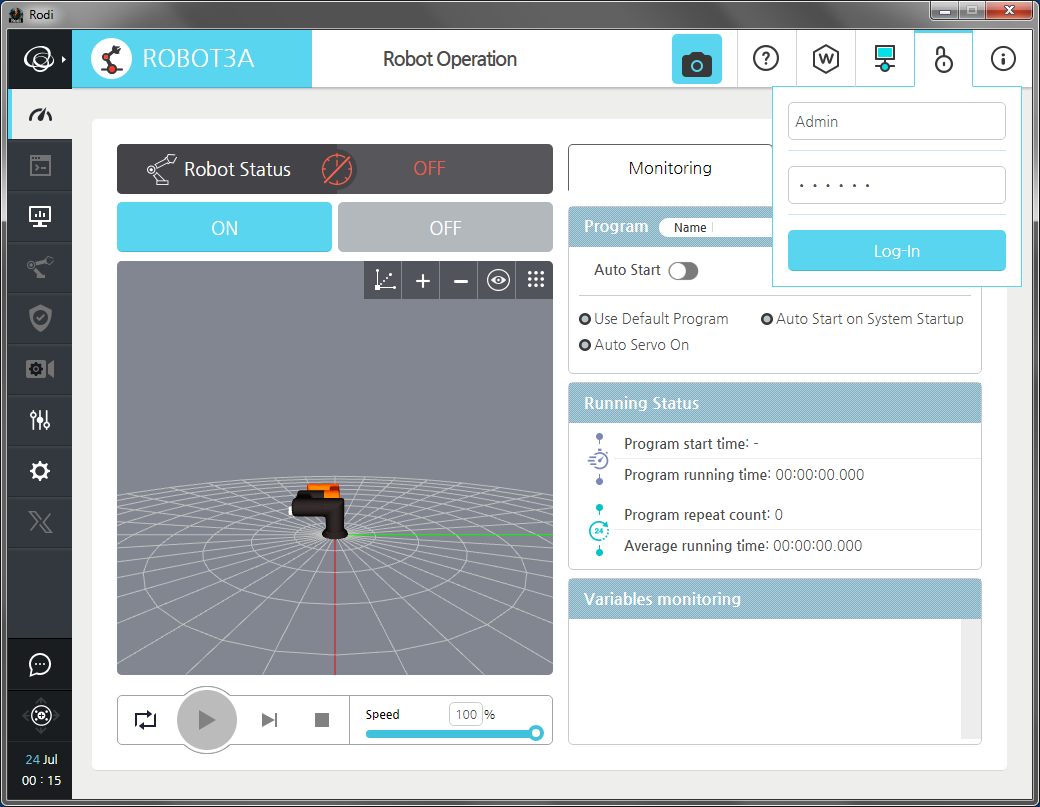
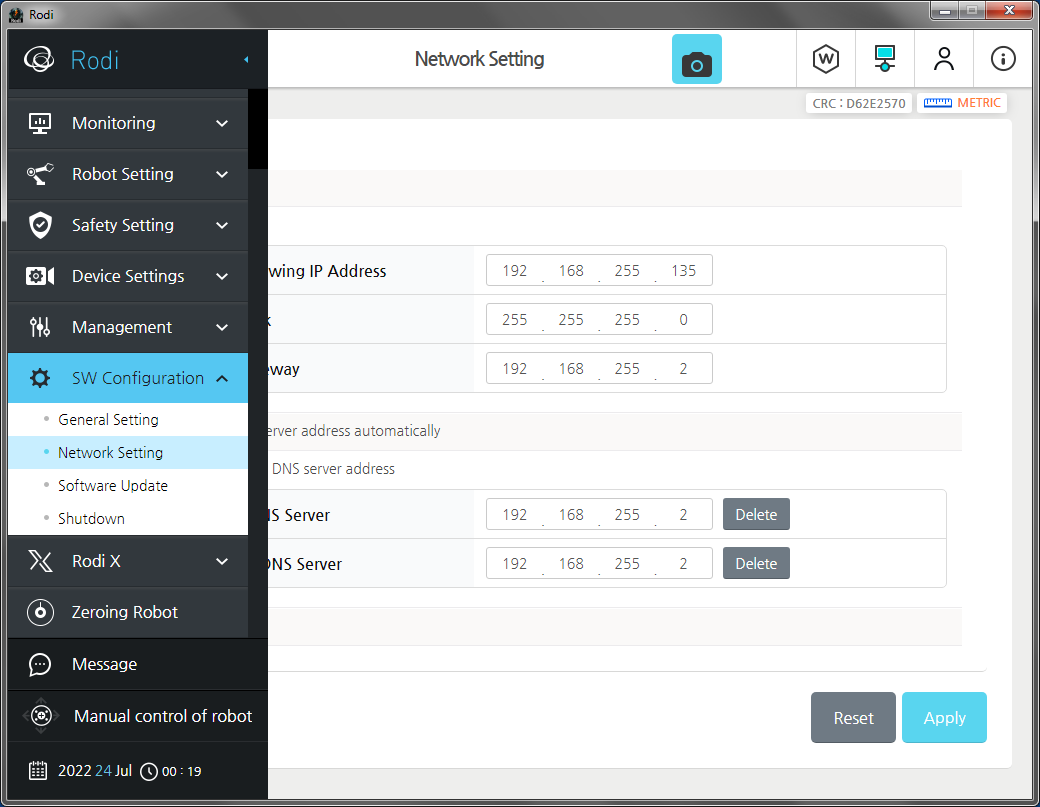
2.Abra Configuración SW⇒ Configuración de red y rellene los parámetros de su red local, en particular la dirección IP y la máscara de subred. Pulse Aplicar y acepte reiniciar si el sistema se lo pide.
Paso 2. Instale el plugin del conector de RoboDK
1.Inicie sesión como administrador
2.Prepare una unidad flash USB con el archivo RoboDK.asar y conéctela al controlador del robot o al teaching pendant.
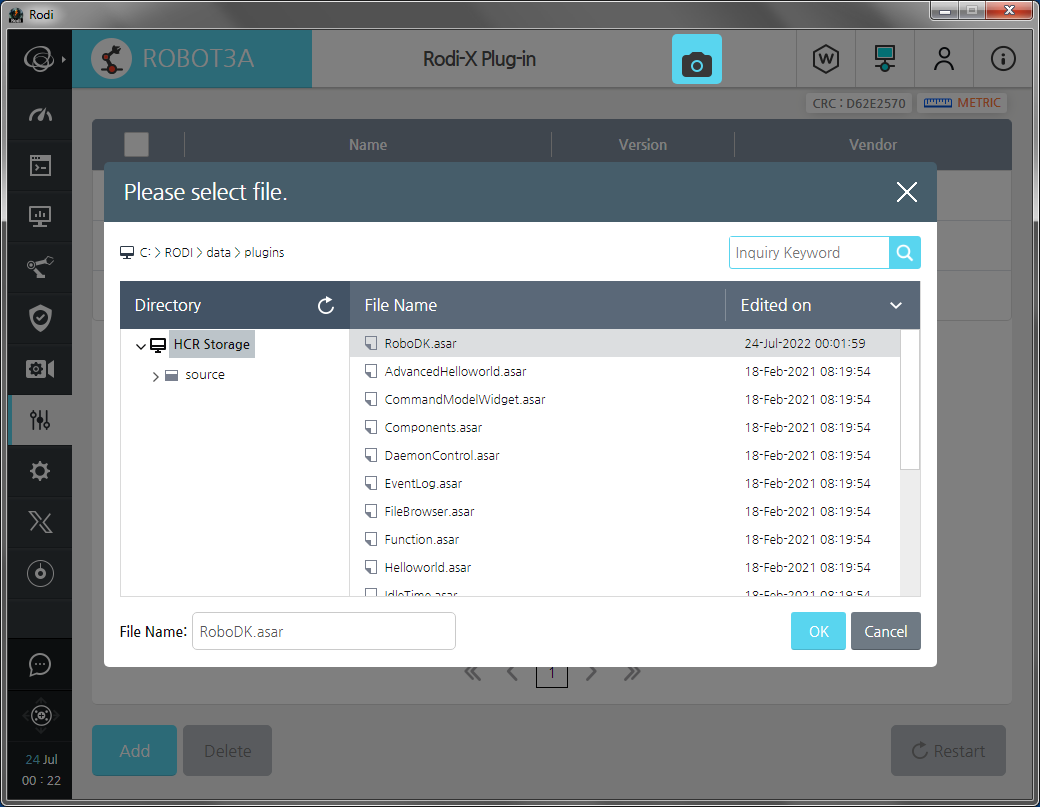
3.Abra Gestión⇒ Rodi-X Addin y haga clic en el botón Añadir para abrir el diálogo Seleccionar archivo.
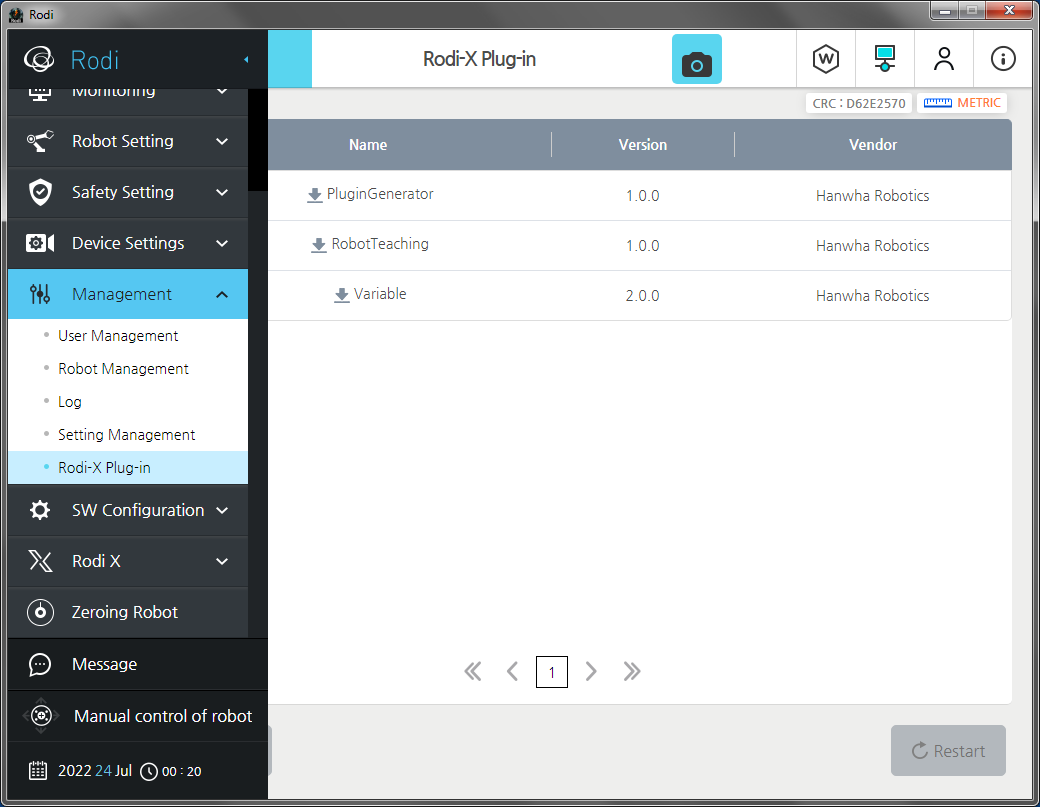
4.Elija RoboDK.asar y haga clic en Aceptar.
5.Pulse el botón Reiniciar.
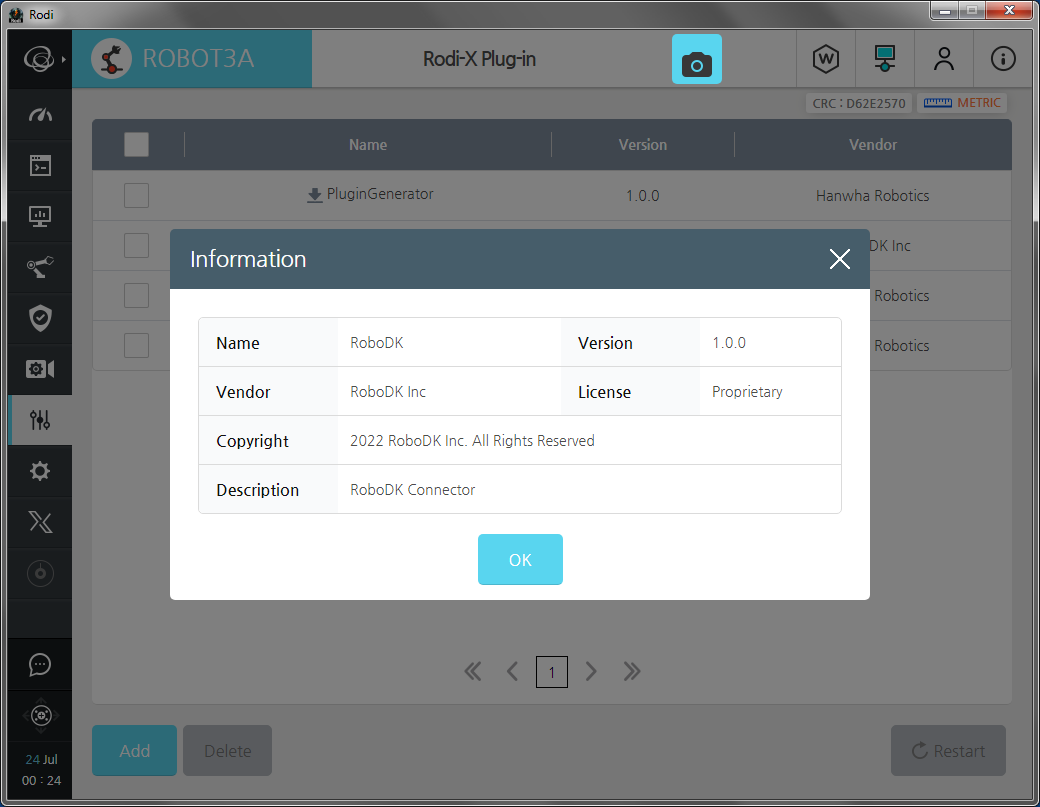
6.Después de recargar, podrá ver información sobre el plugin.
7.Abra el RoboDK Rodi X⇒ y asegúrese de que el campo Estado del servidor no contiene ningún mensaje de error. Si el puerto TCP 7000 parece estar ocupado por otra aplicación, puede cambiarlo introduciendo otro valor en el campo Puerto de comunicación y pulsando Aplicar.
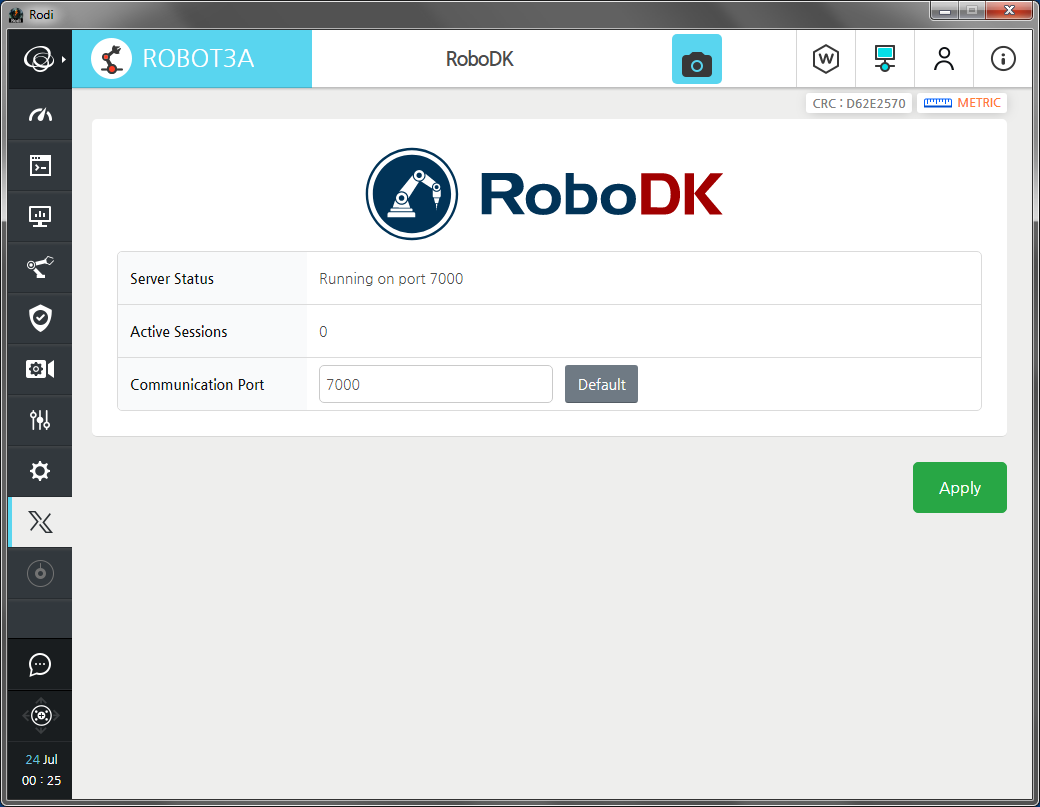
8.Ahora el robot está listo para el control remoto.
Paso 3. Configure la conexión de RoboDK
1.Configure su proyecto RoboDK y coloque en él uno de los robots Hanwha. Por ejemplo, el HCR-3.
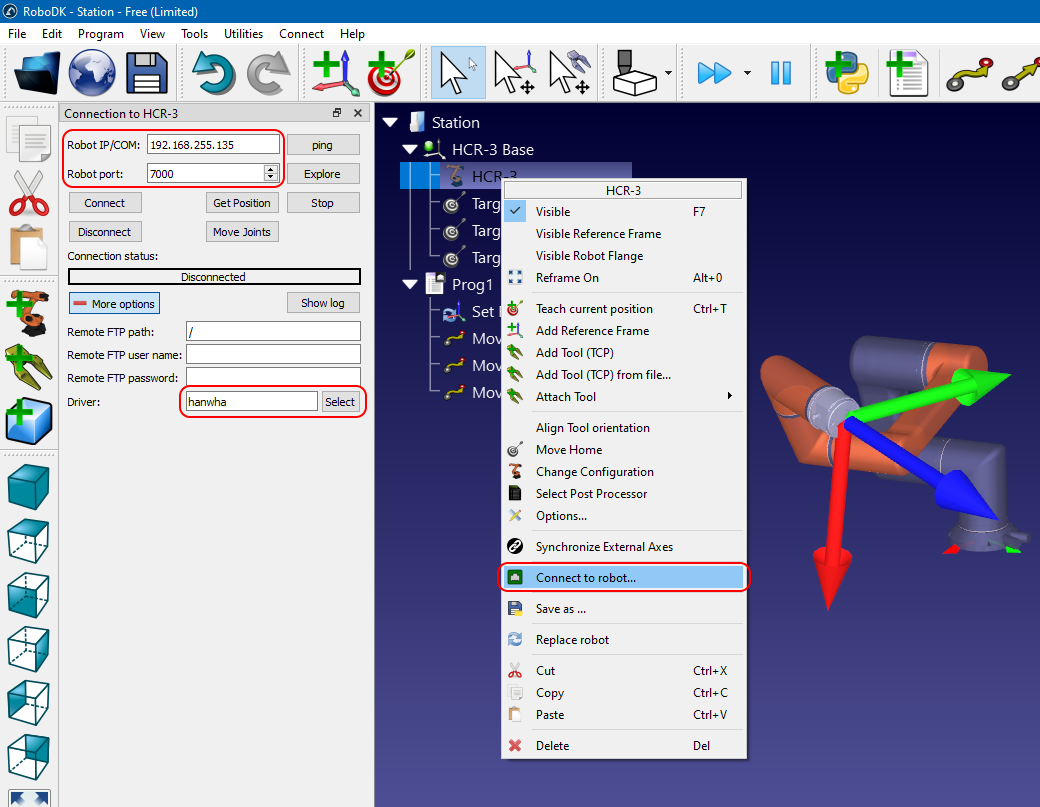
2.Haga clic con el botón derecho del ratón sobre el robot en el árbol de proyectos y seleccione Conectar con robot...
3.En la ventana Conexión al HCR-3, rellene los campos IP/COM del robot y Puerto del robot (utilice la dirección IP del robot y el número de puerto del plug-in de RoboDK).
4.En la misma ventana, pulse el botón Más opciones y escriba Hanwha en el campo Controlador (o utilice el botón Seleccionar para elegir el controlador adecuado de la lista).
5.Pulse el botón Conectar y, si todos los ajustes son correctos, verá Listo en la barra de estado de la conexión.