Controlador RoboDK para JAKA
Se puede establecer una conexión entre RoboDK y el robot JAKA para mover el robot automáticamente desde un PC conectado mediante RoboDK. Esto permite utilizar la opción RoboDK Run on robot para la programación y depuración en línea. La conexión puede establecerse a través de una conexión Ethernet estándar (TCP/IP).
Siga estos pasos para configurar el controlador RoboDK para la programación en línea de JAKA:
1.Inicie la aplicación JAKA Zu y conéctese al robot en la aplicación JAKA Zu.
2.Encienda y habilite el robot JAKA Zu.
3.En la barra de herramientas de RoboDK, seleccione Conectar➔ Conectar robot.
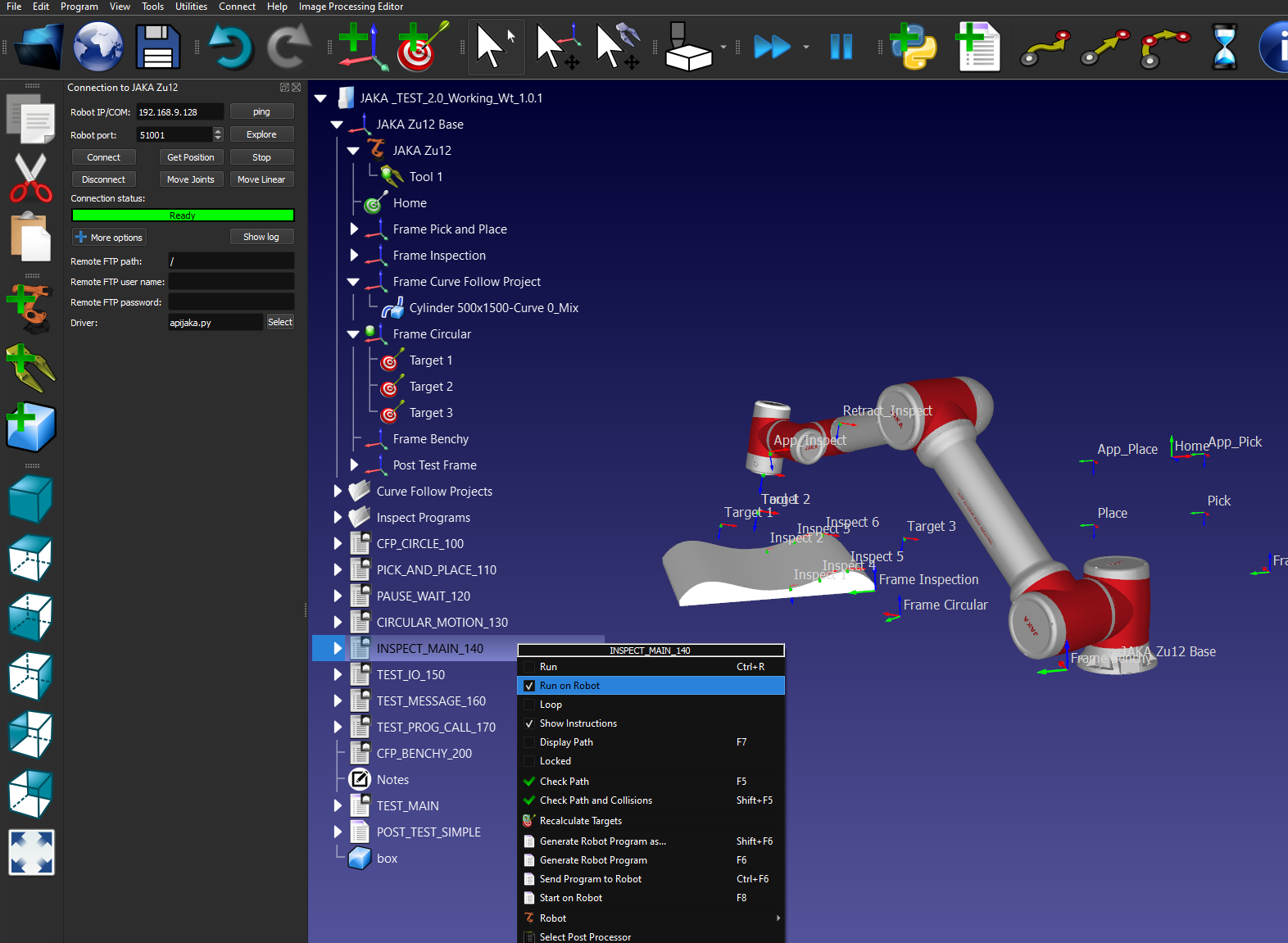
4.En "Más opciones", seleccione el controlador JAKA: apijaka.py.
5.Utilice la IP y el puerto de su robot para conectarlo en RoboDK.
6.Ahora puede mover el robot JAKA directamente desde RoboDK
a.Para mover el robot a un objetivo en RoboDK, haga doble clic en el objetivo en el árbol de estaciones y seleccione los botones "Mover articulaciones" o "Mover lineal" en la interfaz de conexión para efectuar un movimiento de articulación o lineal al objetivo.
b.Para ejecutar un programa en el robot utilizando el controlador, haga clic con el botón derecho del ratón en el programa deseado y seleccione la opción "Ejecutar en el robot". A continuación, haga doble clic en el programa para ejecutarlo en el robot.