Sustituir manualmente el marco de referencia del robot
Los siguientes pasos muestran cómo configurar manualmente el marco de referencia del robot en la aplicación JAKA Zu.
En primer lugar, debe crear un marco JAKA Zu personalizado:
1.En JAKA Zu, vaya a Ajustes➔ Ajustes de operación➔ Sistema de coordenadas del usuario.
2.Pulse el botón de edición para establecer los valores X, Y, Z, RX, RY y RZ de un marco personalizado.
3.Seleccione confirmar para guardar el marco en JAKA Zu.
A continuación, deberá sustituir el marco importado por el marco JAKA Zu:
4.Siga los pasos indicados en Enviar un programa a JAKA Zu.
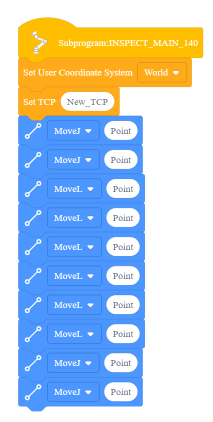
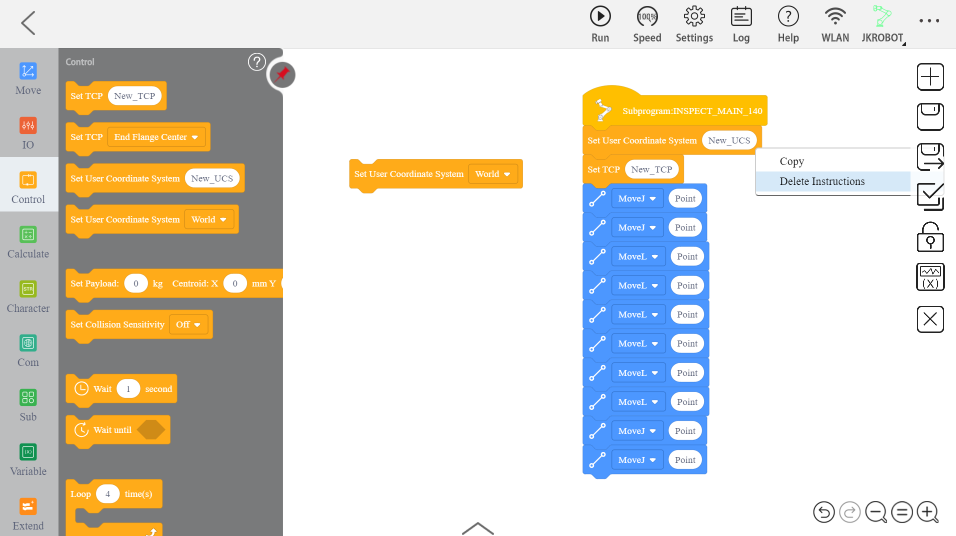
5.Abra la pestaña Control en la barra lateral y localice el mosaico "Establecer sistema de coordenadas del usuario" que contiene el cuadro desplegable.
6.Elimine el mosaico "Nuevo_UCS" que se importó automáticamente haciendo clic con el botón derecho y seleccionando eliminar.
7.Sustituya la baldosa eliminada por la baldosa "Establecer sistema de coordenadas del usuario" y seleccione el marco personalizado en el desplegable.