Robots JAKA
Esta sección de la documentación ofrece una visión general del funcionamiento típico de los robots JAKA que utilizan el software RoboDK para enviar un programa a la aplicación del controlador del robot JAKA.
Las características disponibles incluyen:
1.Control del robot en tiempo real mediante el controlador y "Run on Robot".
2.Enviar un programa a la aplicación JAKA Zu utilizando el postprocesador y "Enviar programa al robot" o cargar manualmente el programa en JAKA Zu importando el archivo .zip generado por RoboDK.
Enviar un programa al controlador JAKA a través de RoboDK
Puede enviar un programa a su controlador de robot JAKA con sólo unos clics desde una simulación RoboDK.
Debe seguir estos pasos para cargar un programa desde RoboDK en JAKA Zu:
1.Inicie la aplicación JAKA Zu y conéctese al robot en la aplicación JAKA Zu.
2.Encienda y habilite el robot JAKA Zu.
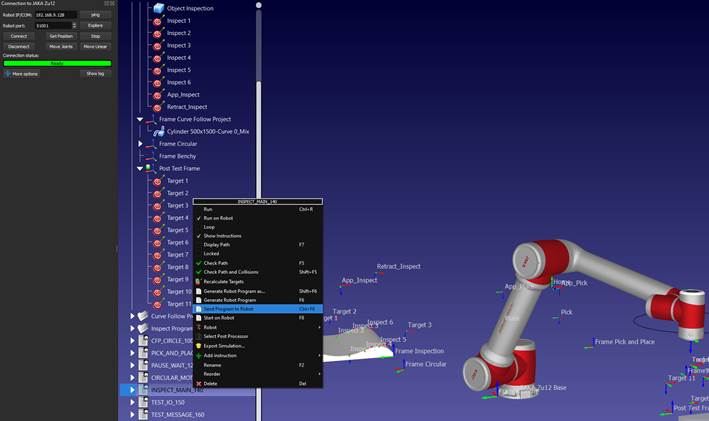
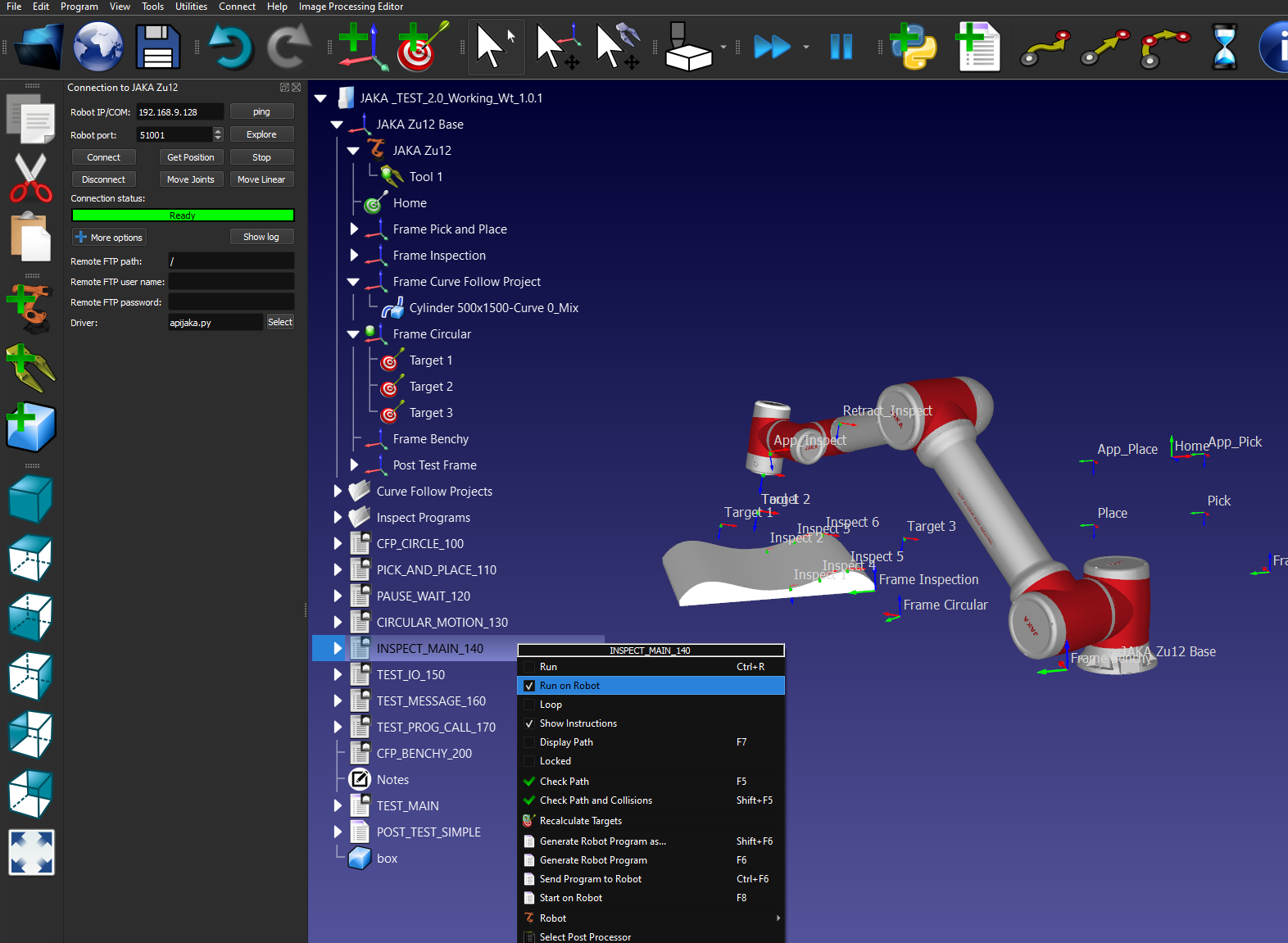
3.En la barra de herramientas de RoboDK, seleccione Conectar➔ Conectar robot.
En Más opciones, asegúrese de tener seleccionado el controlador JAKA: apijaka.py.
4.Utilice la IP y el puerto de su robot para conectarlo en RoboDK.
5.Haga clic con el botón derecho del ratón en el programa que desea enviar a JAKA Zu y seleccione Enviar programa al robot.
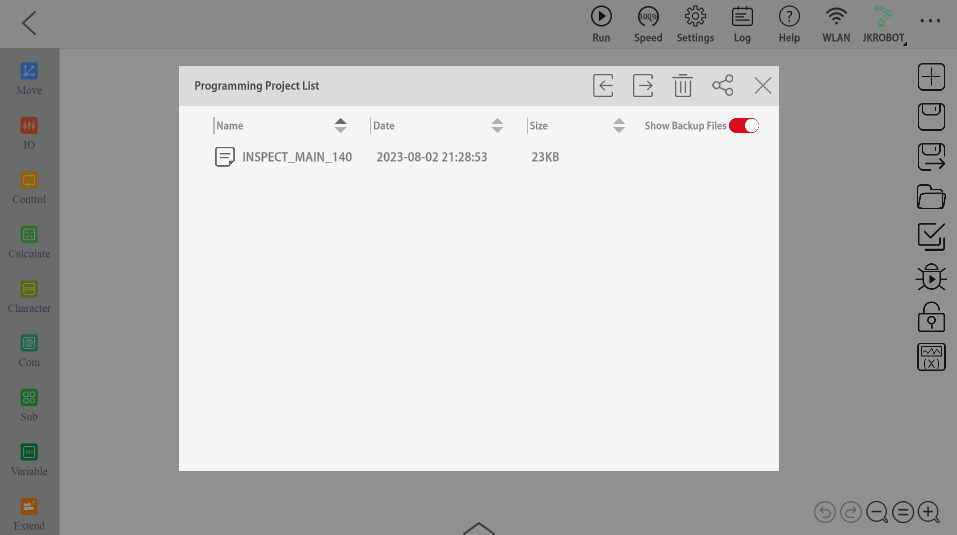
6.En JAKA Zu, navegue hasta la pestaña Control de programación.
7.Abra la lista de proyectos de programación haciendo clic en el icono de la carpeta y seleccione el programa importado.
Importar manualmente un programa al controlador JAKA
Puede importar manualmente los programas de robot generados desde RoboDK a su controlador de robot JAKA.
Debe seguir estos pasos para importar un programa RoboDK en JAKA Zu:
1.Inicie la aplicación JAKA Zu y conéctese al robot en la aplicación JAKA Zu.
2.Encienda y habilite el robot JAKA Zu.
3.Haga clic con el botón derecho del ratón en el programa que desea importar a JAKA Zu y seleccione Generar programa de robot como.....
4.Seleccione la ubicación en la que desea guardar el programa.
5.En JAKA Zu, navegue hasta la pestaña Control de programación.
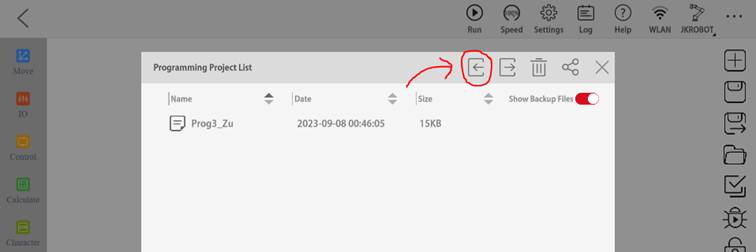
6.Abra la Lista de proyectos de programación haciendo clic en el icono de la carpeta y haga clic en el icono de importación.
7.Localice y seleccione el archivo .zip generado por RoboDK.
8.Abra la lista de proyectos de programación y seleccione el programa importado.
Sustituir manualmente el sistema de coordenadas del robot
Los siguientes pasos muestran cómo configurar manualmente el sistema de coordenadas del robot en la aplicación JAKA Zu.
En primer lugar, debe crear un marco JAKA Zu personalizado:
1.En JAKA Zu, vaya a Ajustes➔ Ajustes de operación➔ Sistema de coordenadas del usuario.
2.Pulse el botón de edición para establecer los valores X, Y, Z, RX, RY y RZ de un marco personalizado.
3.Seleccione confirmar para guardar el marco en JAKA Zu.
A continuación, deberá sustituir el marco importado por el marco JAKA Zu:
4.Siga los pasos indicados en Enviar un programa a JAKA Zu.
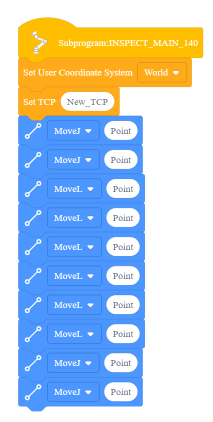
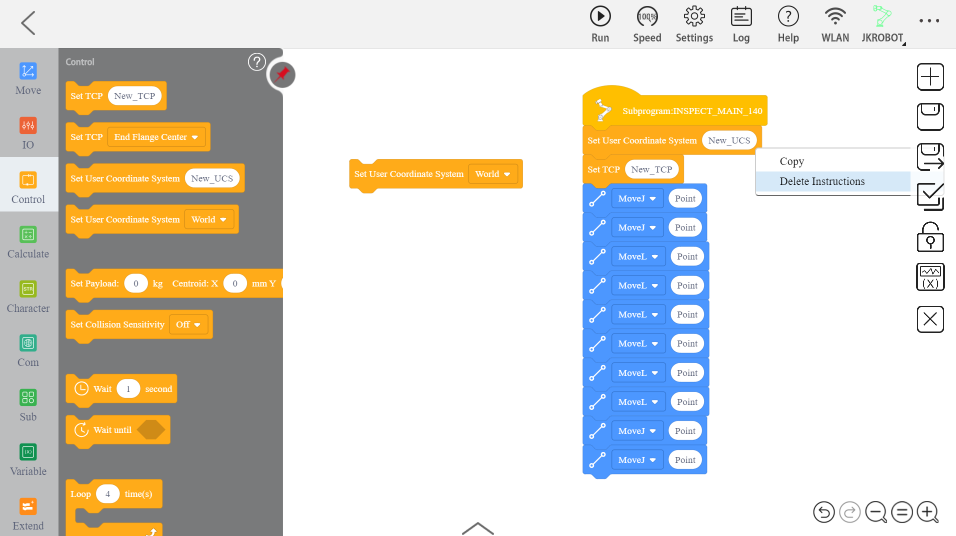
5.Abra la pestaña Control en la barra lateral y localice el mosaico "Establecer sistema de coordenadas del usuario" que contiene el cuadro desplegable.
6.Elimine el mosaico "Nuevo_UCS" que se importó automáticamente haciendo clic con el botón derecho y seleccionando eliminar.
7.Sustituya la baldosa eliminada por la baldosa "Establecer sistema de coordenadas del usuario" y seleccione el marco personalizado en el desplegable.
Sustitución manual de la herramienta del robot (TCP)
También puede configurar manualmente el TCP a través de la aplicación JAKA Zu. Los siguientes pasos describen este proceso.
En primer lugar, debe crear una herramienta JAKA Zu personalizada:
1.En JAKA Zu, vaya a Ajustes➔ Ajustes de funcionamiento➔ Ajustes TCP.
2.Pulse el botón de edición para establecer los valores X, Y, Z, RX, RY y RZ para el TCP personalizado.
3.Seleccione confirmar para guardar la herramienta en JAKA Zu.
A continuación, deberá sustituir la herramienta importada por la herramienta JAKA Zu:
4.Siga los pasos indicados en Enviar un programa a JAKA Zu.
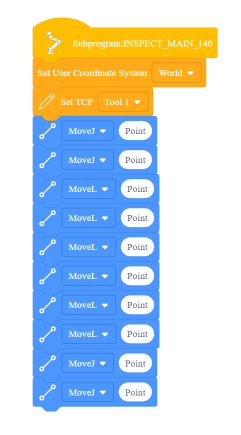
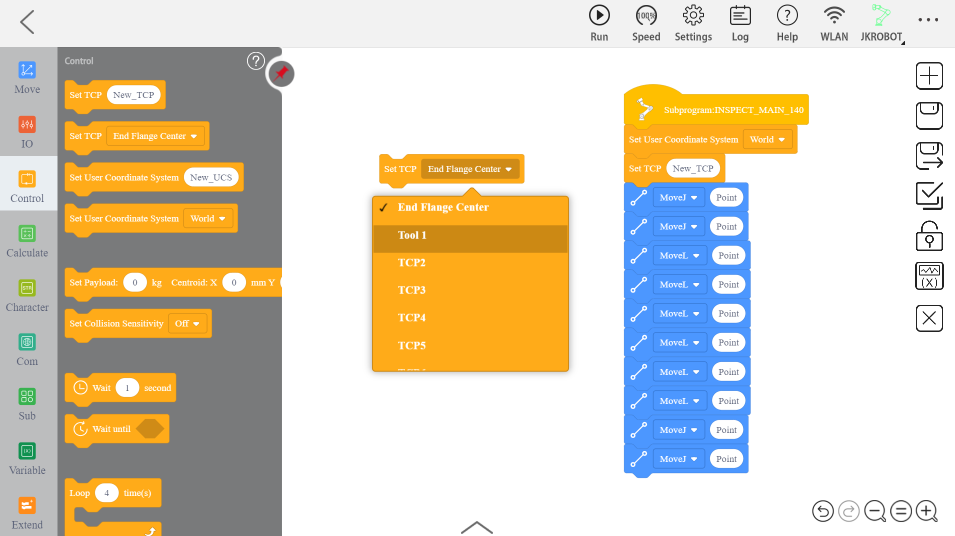
5.Abra la pestaña Control en la barra lateral y localice el mosaico "Establecer TCP" que contiene el cuadro desplegable.
6.Elimine el mosaico "Nuevo_TCP" que se importó automáticamente haciendo clic con el botón derecho y seleccionando eliminar.
7.Sustituya la ficha eliminada por la ficha desplegable "Establecer TCP".
8.Seleccione la herramienta deseada en el menú desplegable.
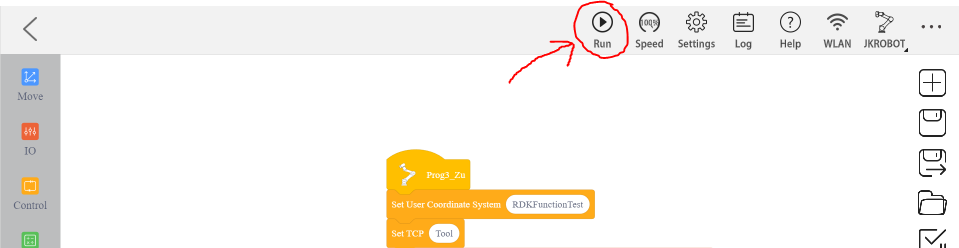
Iniciar un programa de robot
Siga estos pasos para iniciar un programa de robot en un robot JAKA.
1.Siga los pasos indicados en Enviar un programa a JAKA Zu.
2.En la barra de herramientas superior, seleccione "Ejecutar".
Controlador RoboDK para JAKA
Se puede establecer una conexión entre RoboDK y el robot JAKA para mover el robot automáticamente desde un PC conectado mediante RoboDK. Esto permite utilizar la opción RoboDK Run on robot para la programación y depuración en línea. La conexión puede establecerse a través de una conexión Ethernet estándar (TCP/IP).
Siga estos pasos para configurar el controlador RoboDK para la programación en línea de JAKA:
1.Inicie la aplicación JAKA Zu y conéctese al robot en la aplicación JAKA Zu.
2.Encienda y habilite el robot JAKA Zu.
3.En la barra de herramientas de RoboDK, seleccione Conectar➔ Conectar robot.
4.En "Más opciones", seleccione el controlador JAKA: apijaka.py.
5.Utilice la IP y el puerto de su robot para conectarlo en RoboDK.
6.Ahora puede mover el robot JAKA directamente desde RoboDK
a.Para mover el robot a un objetivo en RoboDK, haga doble clic en el objetivo en el árbol de estaciones y seleccione los botones "Mover articulaciones" o "Mover lineal" en la interfaz de conexión para efectuar un movimiento de articulación o lineal al objetivo.
b.Para ejecutar un programa en el robot utilizando el controlador, haga clic con el botón derecho del ratón en el programa deseado y seleccione la opción "Ejecutar en el robot". A continuación, haga doble clic en el programa para ejecutarlo en el robot.
Recuperación de la dirección IP del simulador virtual JAKA
Para recuperar una dirección IP del simulador virtual, debe descodificar la cadena Base64 que se solicita en el campo Dirección del robot que se muestra a continuación:
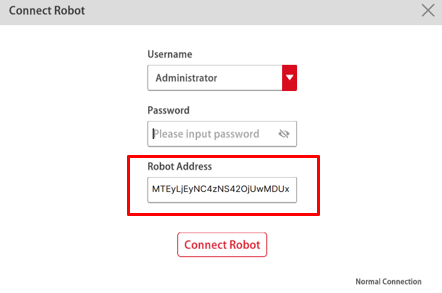
Utilizando herramientas como https://www.base64decode.net/ puede recuperar la IP y el puerto del robot a partir de la dirección del mismo.


En este ejemplo, la IP es 112.124.35.6 y el puerto es 50051.