Ejecutar un programa en el controlador KEBA
vez que su simulación RoboDK esté lista, puede generar un programa offline que pueda ser ejecutado por el controlador del robot KEBA (archivo KAIRO).
Siga estos pasos para generar un programa para su controlador (archivo KAIRO) a partir de la simulación de su robot:
1.Haga clic con el botón derecho en un programa.
2.Seleccione Generar programa robot F6. A continuación, transfiera manualmente los archivos por FTP al proyecto que desee
Alternativamente, seleccione Generar programa robot Ctrl+F6 después de configurar SFTP
3.En la pestaña de proyecto del teach pendant, pulse actualizar
4.Cargue el programa y luego cargue el archivo principal

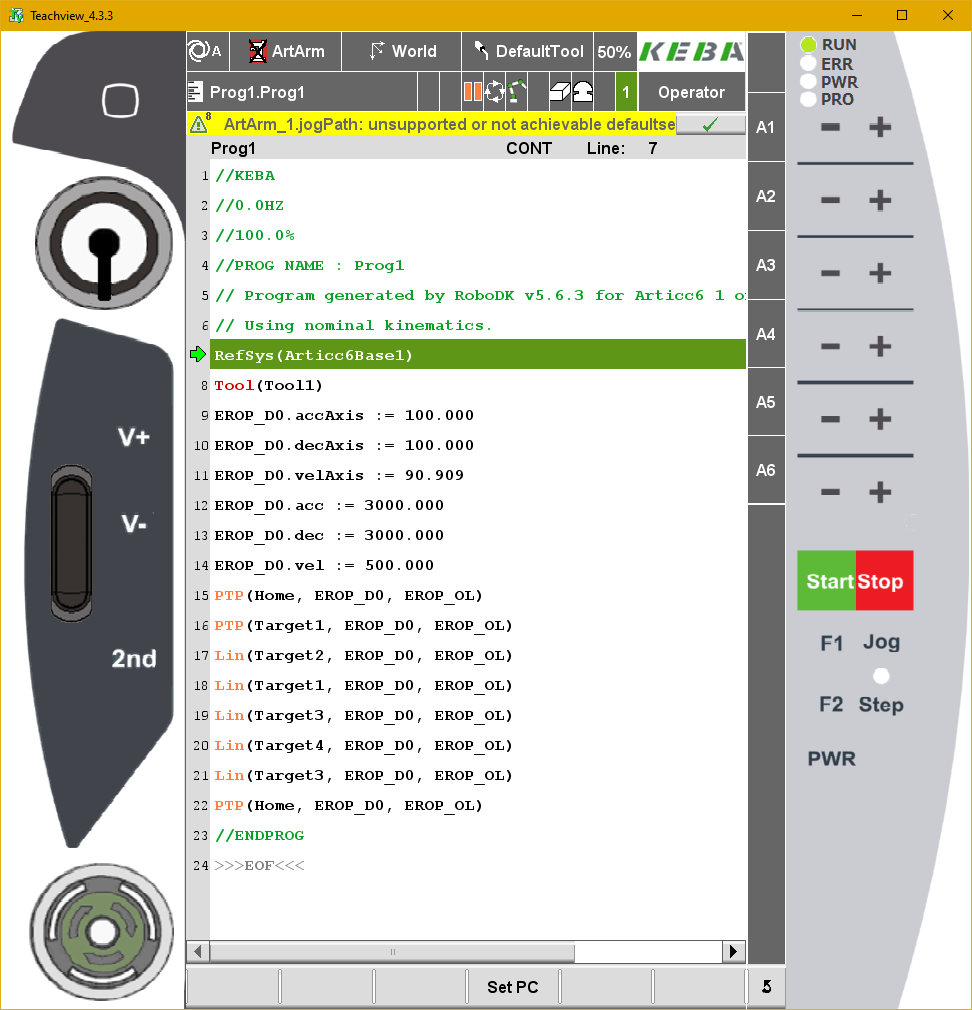
El programa se mostrará en un editor de texto. Encontrará más información sobre cómo generar programas desde RoboDK en la sección de programas de robot de la documentación.