Controladores KEBA
Puede programar los controladores KEBA desde RoboDK utilizando dos métodos diferentes: Puede generar programas de robot offline utilizando el postprocesador KEBA KAIRO o utilizando el controlador RoboDK.
Utilizando el postprocesador KEBA KAIRO puede obtener archivos KAIRO que pueden ser cargados en el controlador KEBA utilizando RoboDK. Esto se consigue utilizando el postprocesador por defecto utilizado para los robots KEBA. Además, puede transferir directamente los archivos del programa de script utilizando FTP o una unidad USB.
Además, utilizando el controlador para robots KEBA, puede ejecutar programas en el robot desde RoboDK si el robot está conectado al ordenador.
Recuperar la IP del controlador KEBA
Necesita la IP de su controlador KEBA para transferir o ejecutar automáticamente programas desde RoboDK. Puede asegurarse de si la IP de su robot es correcta introduciendo la IP en un navegador para acceder a la interfaz web
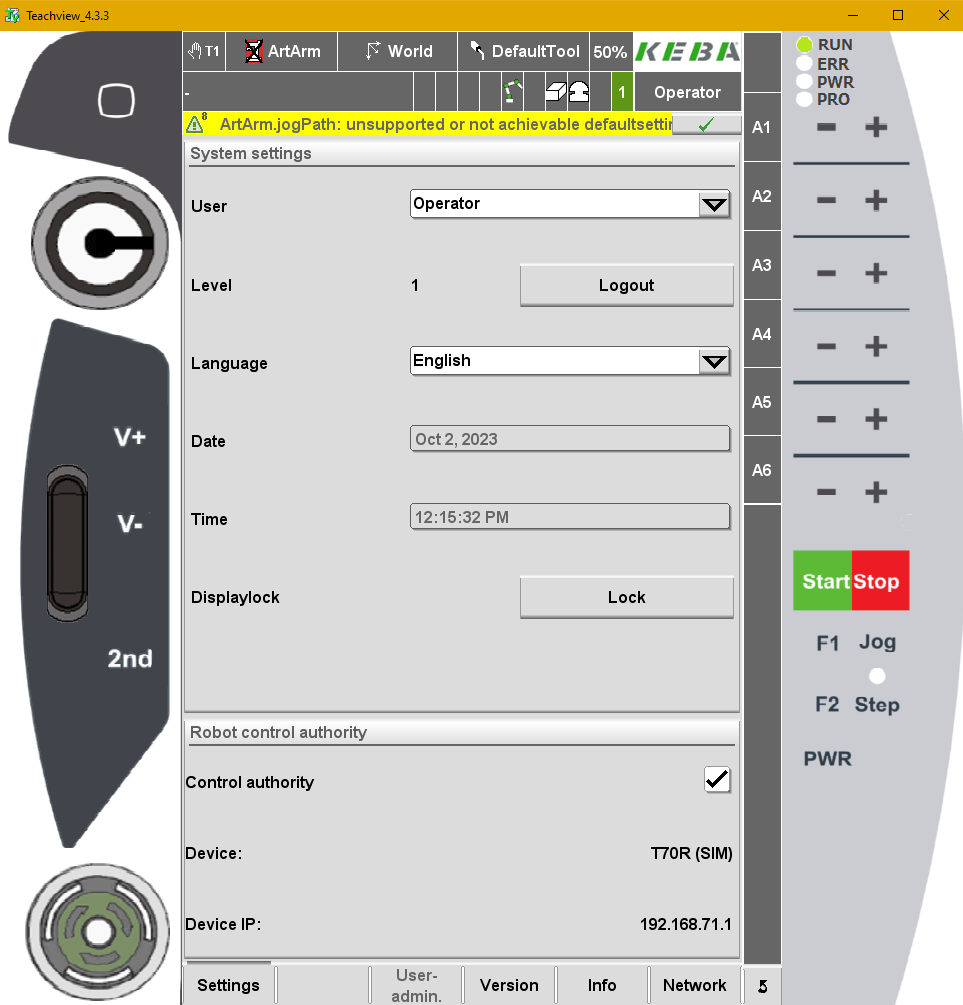
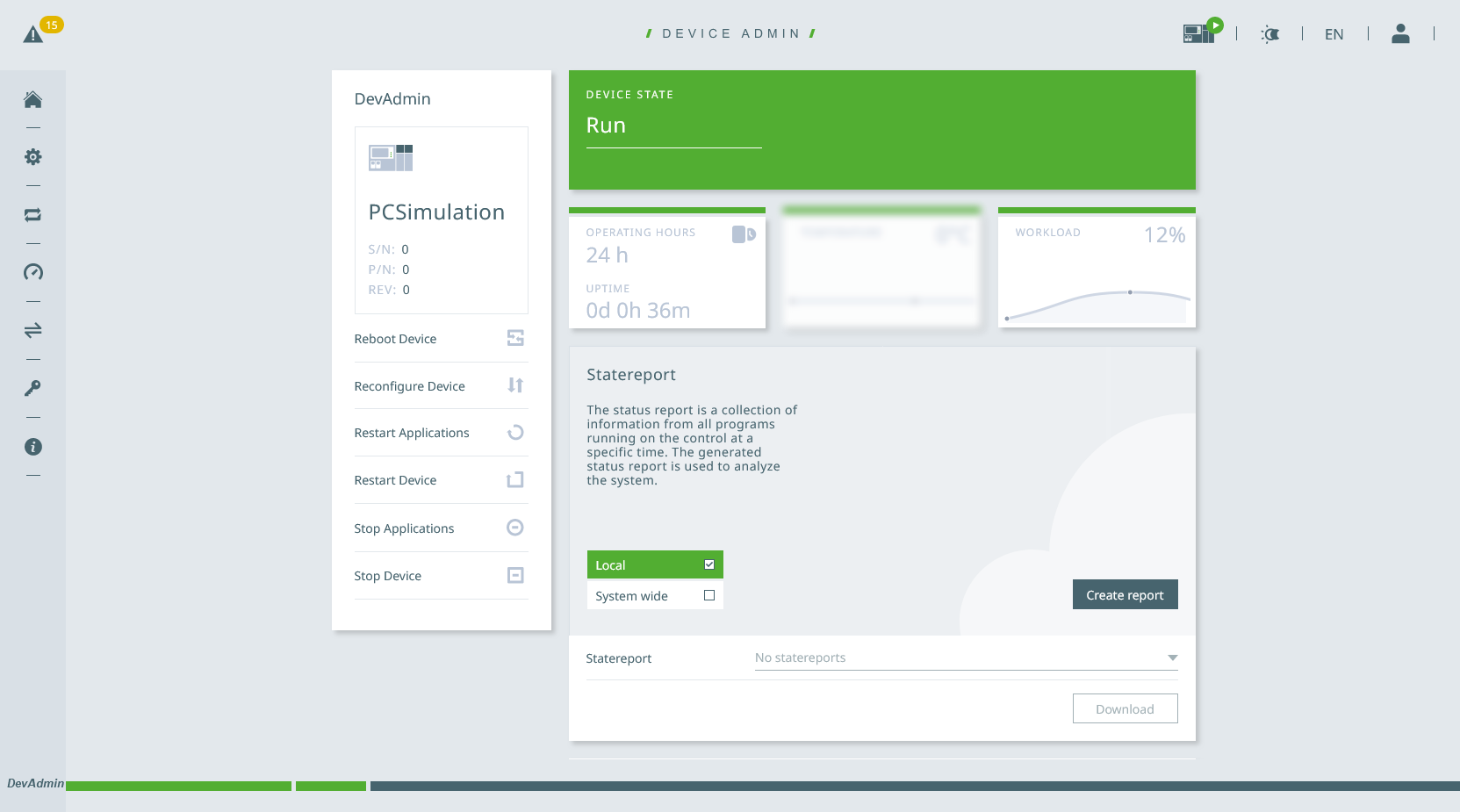
Para obtener la IP puede ir a la ventana de servicio de su teach pendant y luego seleccionar la pestaña de información.
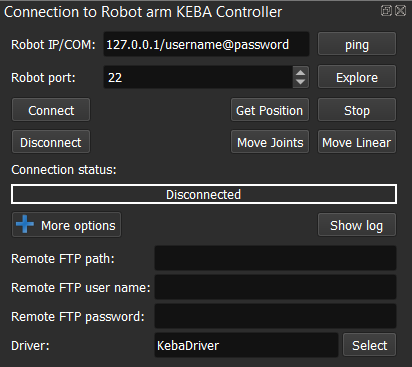
El formato de la dirección IP introducida en RoboDK debe contener el nombre de usuario y la contraseña y debe seguir el siguiente formato: .127.0.0.1/username@password
Las siguientes imágenes muestran cómo recuperar la IP del controlador desde la consola de programación del controlador.

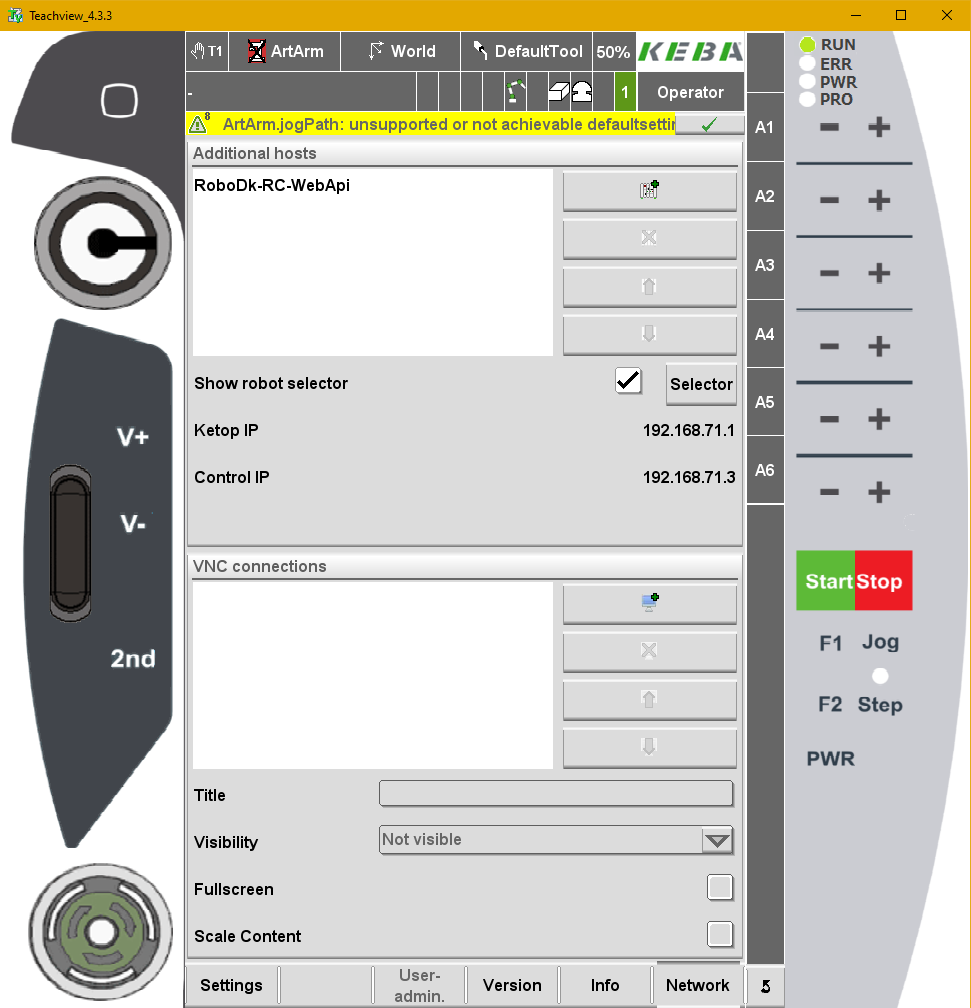
Asegúrese de configurar correctamente una conexión de red si no puede ver la interfaz web del robot, como se muestra en la siguiente imagen.
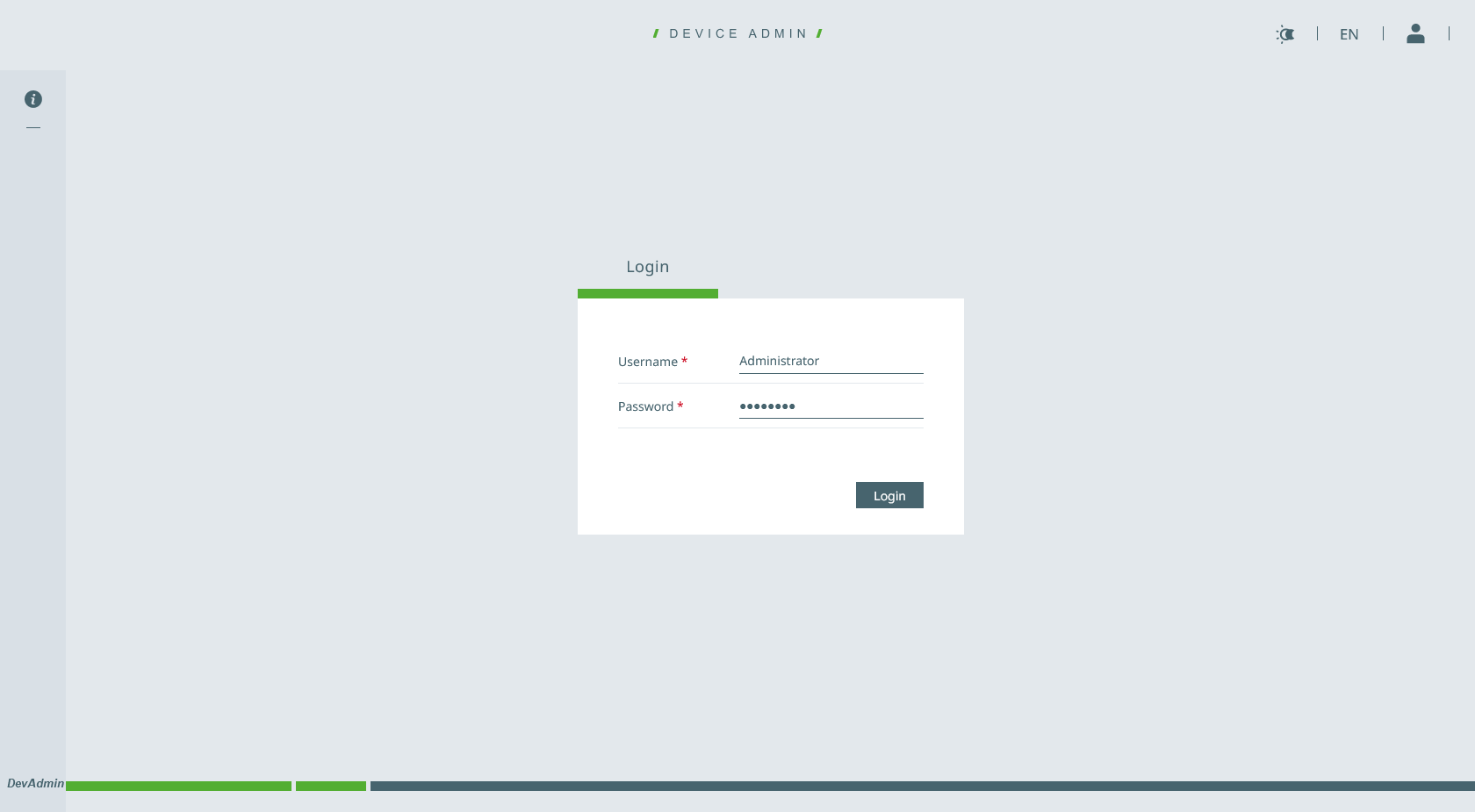
También necesitará el nombre de usuario y la contraseña utilizados para acceder a la interfaz web del robot, puede comprobar que son válidos accediendo a través de la interfaz web.
Ejecutar un programa en el controlador KEBA
vez que su simulación RoboDK esté lista, puede generar un programa offline que pueda ser ejecutado por el controlador del robot KEBA (archivo KAIRO).
Siga estos pasos para generar un programa para su controlador (archivo KAIRO) a partir de la simulación de su robot:
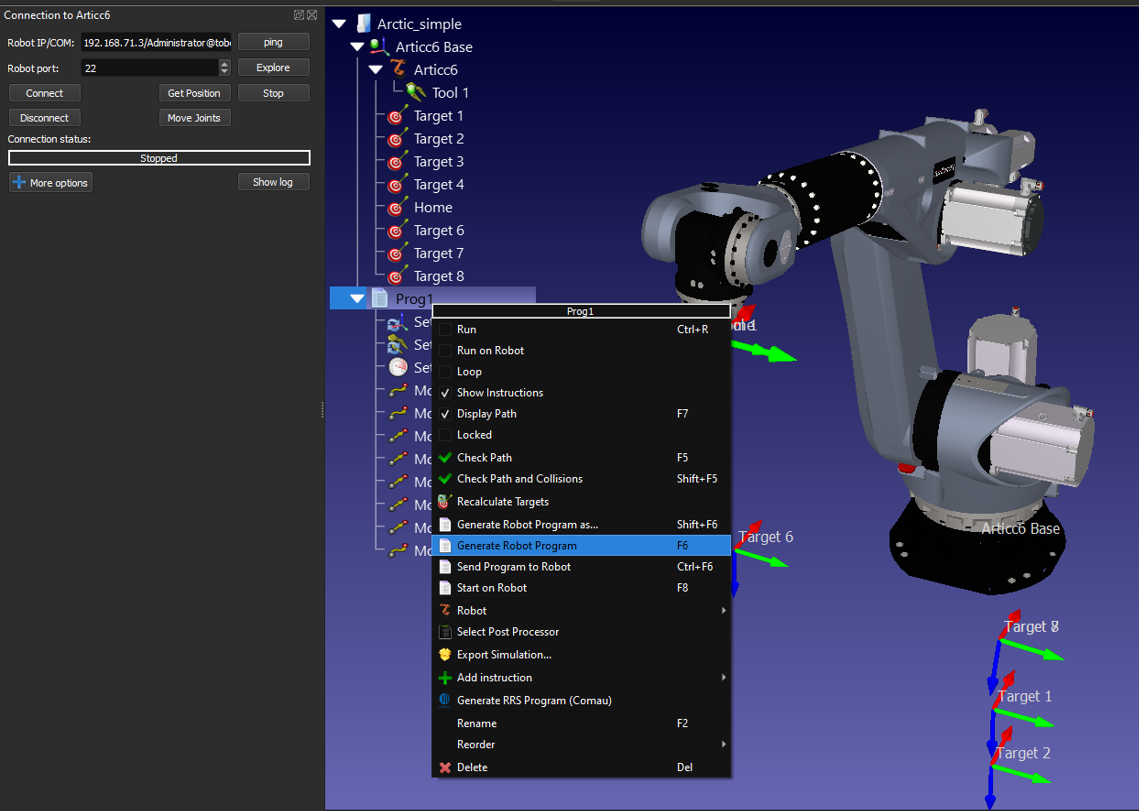
1.Haga clic con el botón derecho en un programa.
2.Seleccione Generar programa robot F6. A continuación, transfiera manualmente los archivos por FTP al proyecto que desee
Alternativamente, seleccione Generar programa robot Ctrl+F6 después de configurar SFTP
3.En la pestaña de proyecto del teach pendant, pulse actualizar
4.Cargue el programa y luego cargue el archivo principal

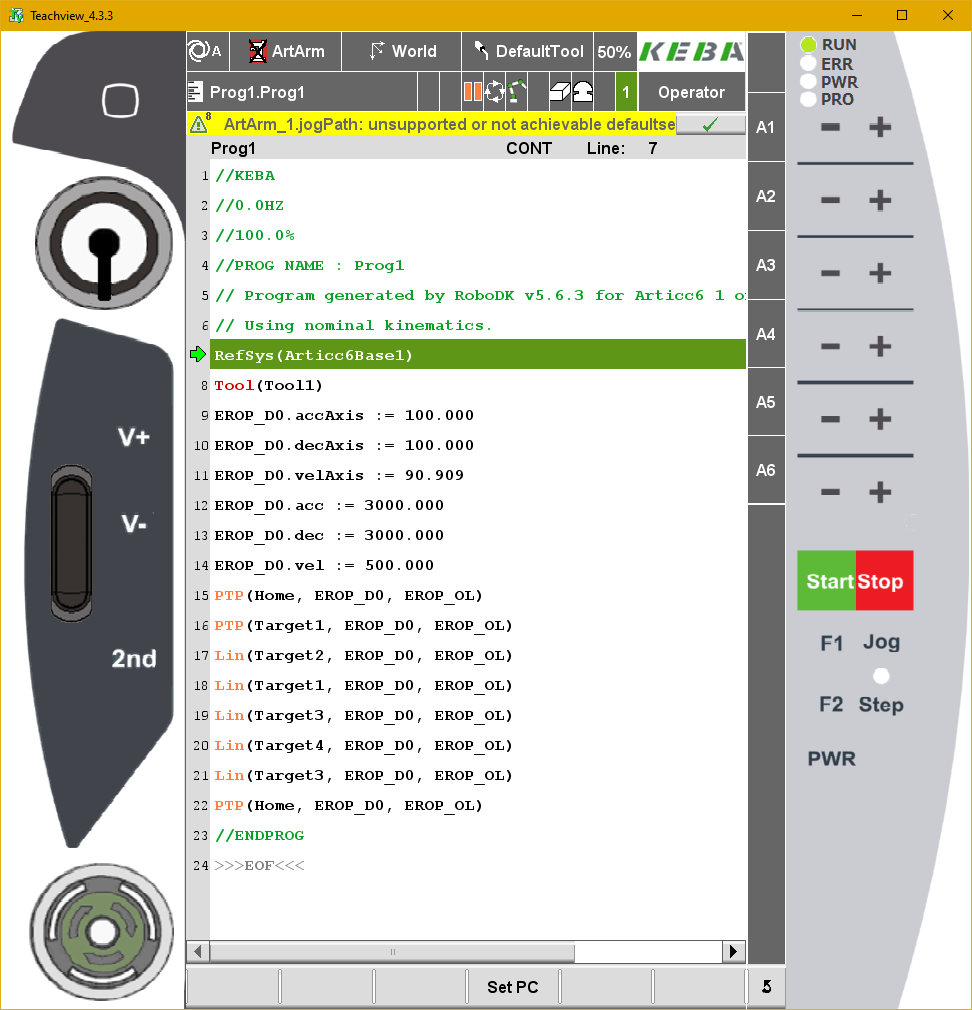
El programa se mostrará en un editor de texto. Encontrará más información sobre cómo generar programas desde RoboDK en la sección de programas de robot de la documentación.
Ejecutar programa desde RoboDK
Los controladores de robot proporcionan una alternativa a la programación fuera de línea (en la que se genera un programa y, a continuación, se transfiere al robot y se ejecuta). Puede ejecutar una simulación desde RoboDK directamente en el robot (Programación en línea). Encontrará más información sobre los controladores en la sección Controladores de robot.
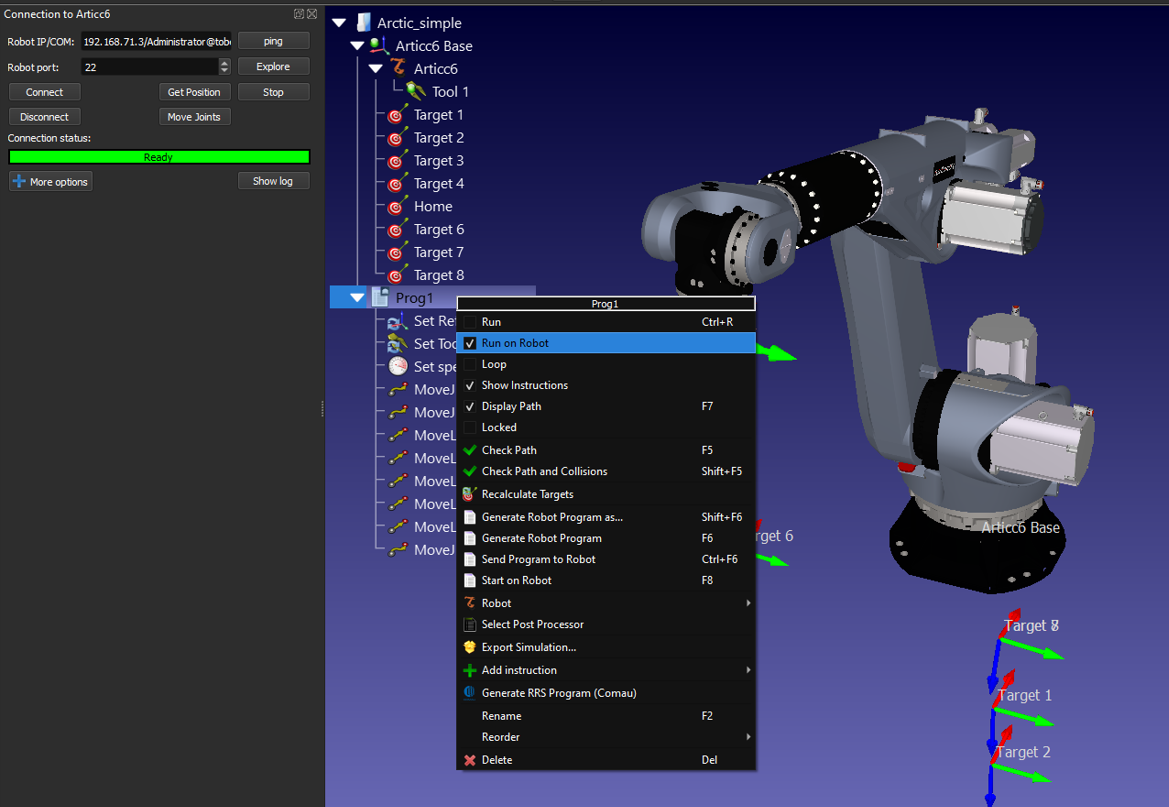
Siga estos pasos para conectarse al robot desde RoboDK:
1.Haga clic con el botón derecho en el robot en RoboDK.
2.Seleccionar: 
3.Introduzca la IP del robot.
4.Seleccione Conectar.
Debería aparecer un mensaje verde indicando Listo si la conexión ha tenido éxito. Si no es así, asegúrese de que tiene la IP, el nombre de usuario y la contraseña correctos. Asegúrese también de formatear correctamente la dirección IP en el RoboDK como se menciona en las secciones anteriores (127.0.0.1/nombreusuario@contraseña).
El robot se puede mover seleccionando Obtener articulaciones del robot en el menú de conexiones, mueva el robot y haga clic en Mover articulaciones para mover el robot en el menú de conexiones.
Para ejecutar programas desde el PC directamente en su robot debe habilitar la Ejecutar en robot en sus programas. Los siguientes pasos describen cómo habilitar la opción Ejecutar en el robot:
a.Haga clic con el botón derecho del ratón en el programa (Print3D en este ejemplo)
b.Seleccione Ejecutar en robot
c.Haga doble clic en el programa para iniciarlo (o haga clic con el botón derecho y seleccione Ejecutar)
Este método de programación de robots es útil a efectos de depuración, sin embargo, para desplegar un programa de robot es mejor generar el programa fuera de línea como se ha mencionado en la sección anterior.
Una vez marcada la opción Ejecutar en el robot, se conectará al robot real cada vez que hagamos doble clic en un programa (o clic con el botón derecho y, a continuación, seleccione Ejecutar).
Estas operaciones también están disponibles en la API de RoboDK y permite integrar la programación de robots con otras aplicaciones. La API está disponible en Python y C# y otros lenguajes de programación.
Uso del archivo PPK para SFTP
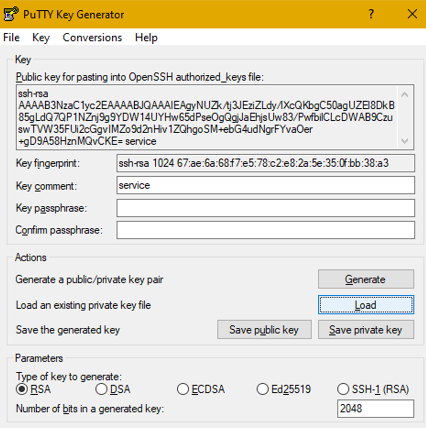
En lugar de utilizar el nombre de usuario y la contraseña para transferir archivos, también puede utilizar un archivo de claves. Para ello tendrá que convertir el archivo PPK proporcionado por KEBA que vino con su robot en un archivo PEM. Esto puede hacerse con puttygen, una utilidad que viene instalada con putty.
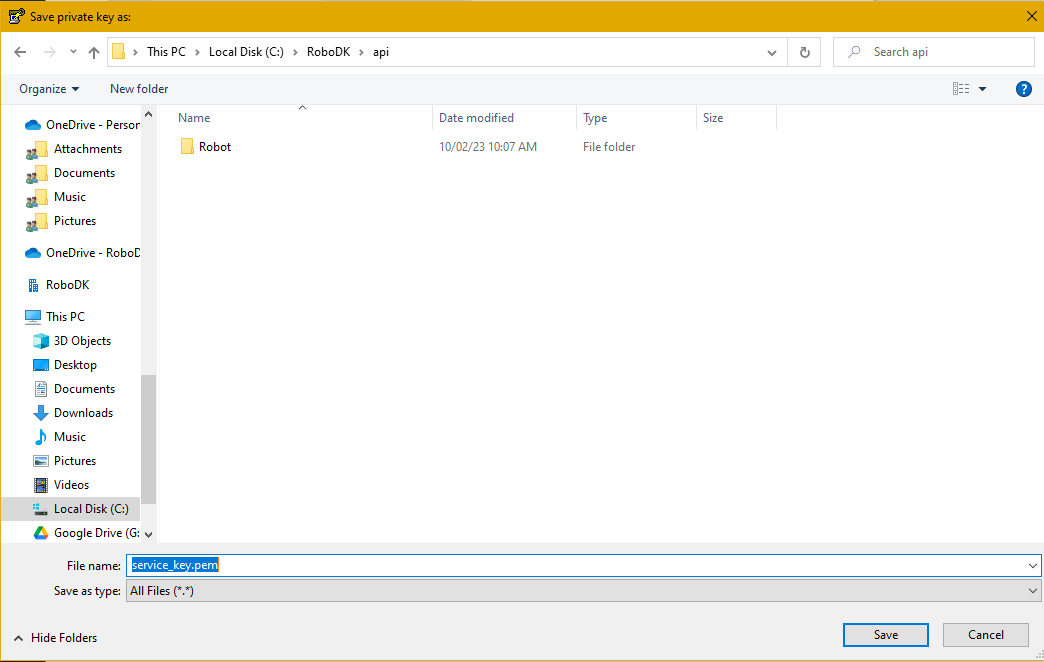
En Puttygen, cargue el archivo llave seleccionando Cargar. A continuación, haga clic en el desplegable Conversiones y seleccione Exportar clave SSH abierta (forzar nuevo formato de archivo).
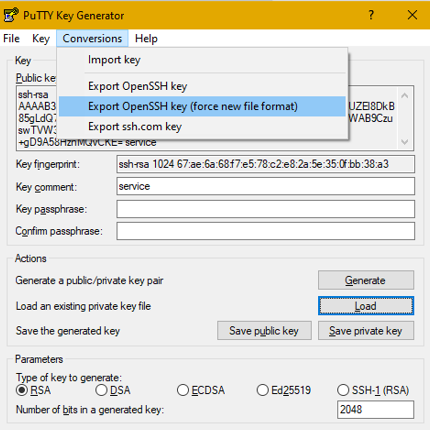
Asigne un nombre a service_key.pem y guarde el archivo en la carpeta de la API de RoboDK, que por defecto se encuentra en C:\RoboDK\api.