Recuperando el TCP
Los siguientes pasos permiten crear o modificar herramientas del robot (TCP, también conocido como $BASE en programación de robot KUKA KRC):
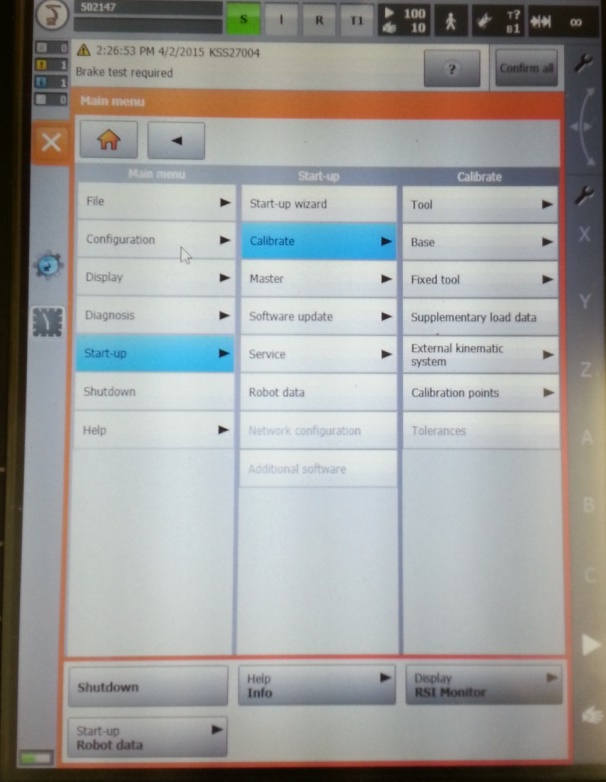
1.Seleccione Menú➔Comenzar ➔Calibrar➔Herramienta
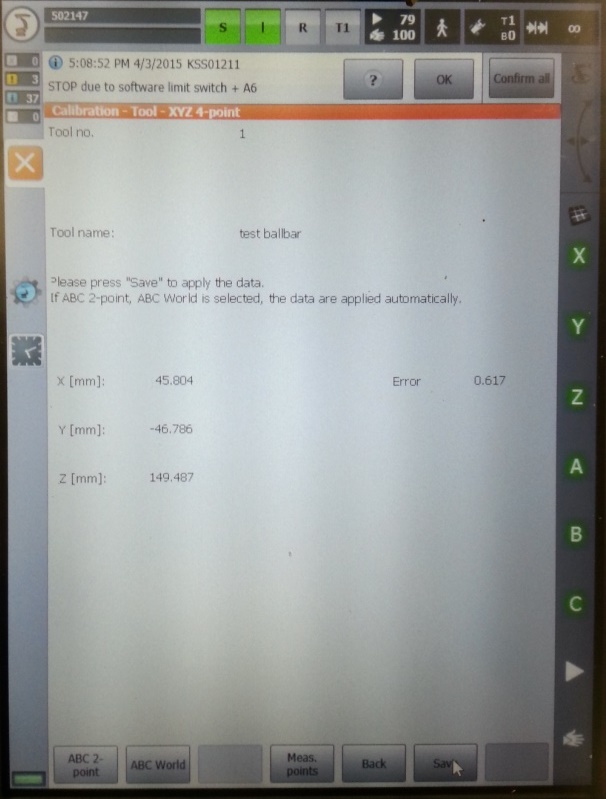
2.Seleccione una herramienta y edite o recupere la posición X, Y, Z del TCP.