Recuperando las articulaciones del robot
Los siguientes pasos permiten recuperar las articulaciones del robot:
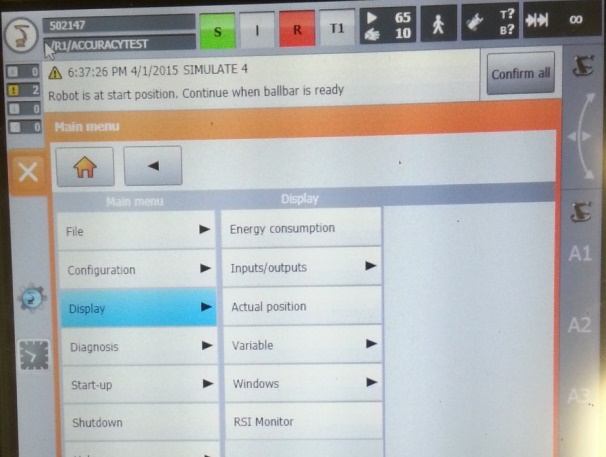
1.Seleccione MENÚ➔Pantalla➔Posición actual
2.Seleccione modo Articulaciones y utilice la columna izquierda para tomar las articulaciones del robot
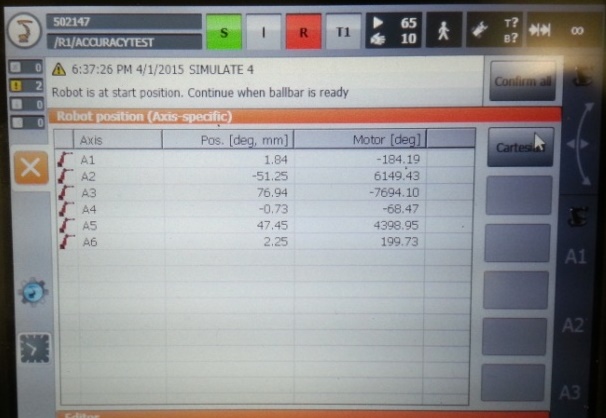
Consejo: Es posible recuperar las articulaciones del robot con mayor precisión (5 decimales de precisión) monitoreando la variable $AXIS_ACT o simplemente usando el controlador de robot RoboDK para KUKA y seleccionando el botón Obtener articulaciones del robot.