Ejecutar un programa en el controlador Mecademic
vez que su simulación RoboDK esté lista, puede generar un programa offline que pueda ser ejecutado por el controlador del robot Mecademic (archivo script). También puede generar un archivo PY que ejecutará el programa en el controlador del robot desde un ordenador remoto.
Siga estos pasos para generar un programa fuera de línea (un script o un archivo PY) a partir de la simulación de su robot:
1.Haga clic con el botón derecho en un programa (Prog1 en este ejemplo)
2.Seleccione Generar programa robot F6
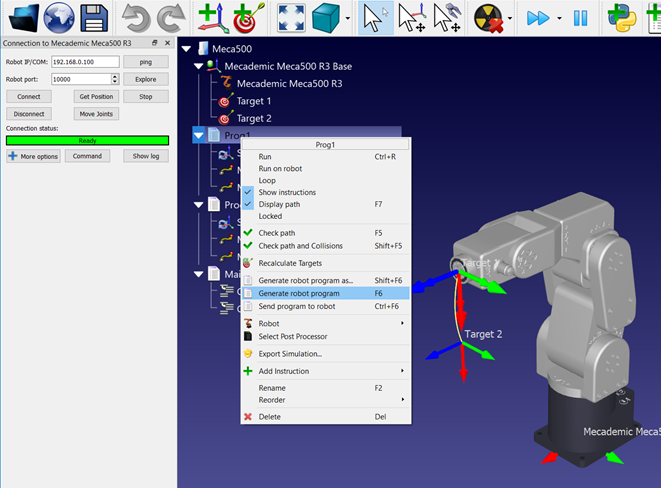
El programa se mostrará en un editor de texto (este comportamiento puede cambiarse en el menú: Herramientas➔ Opciones➔ Programa).
Cómo cargar un archivo script
Una vez que obtenga un archivo de programa/script puede ejecutar el programa o cargarlo en el controlador utilizando la interfaz web. Siga estos pasos para ejecutar el programa utilizando la interfaz web de Mecademic:
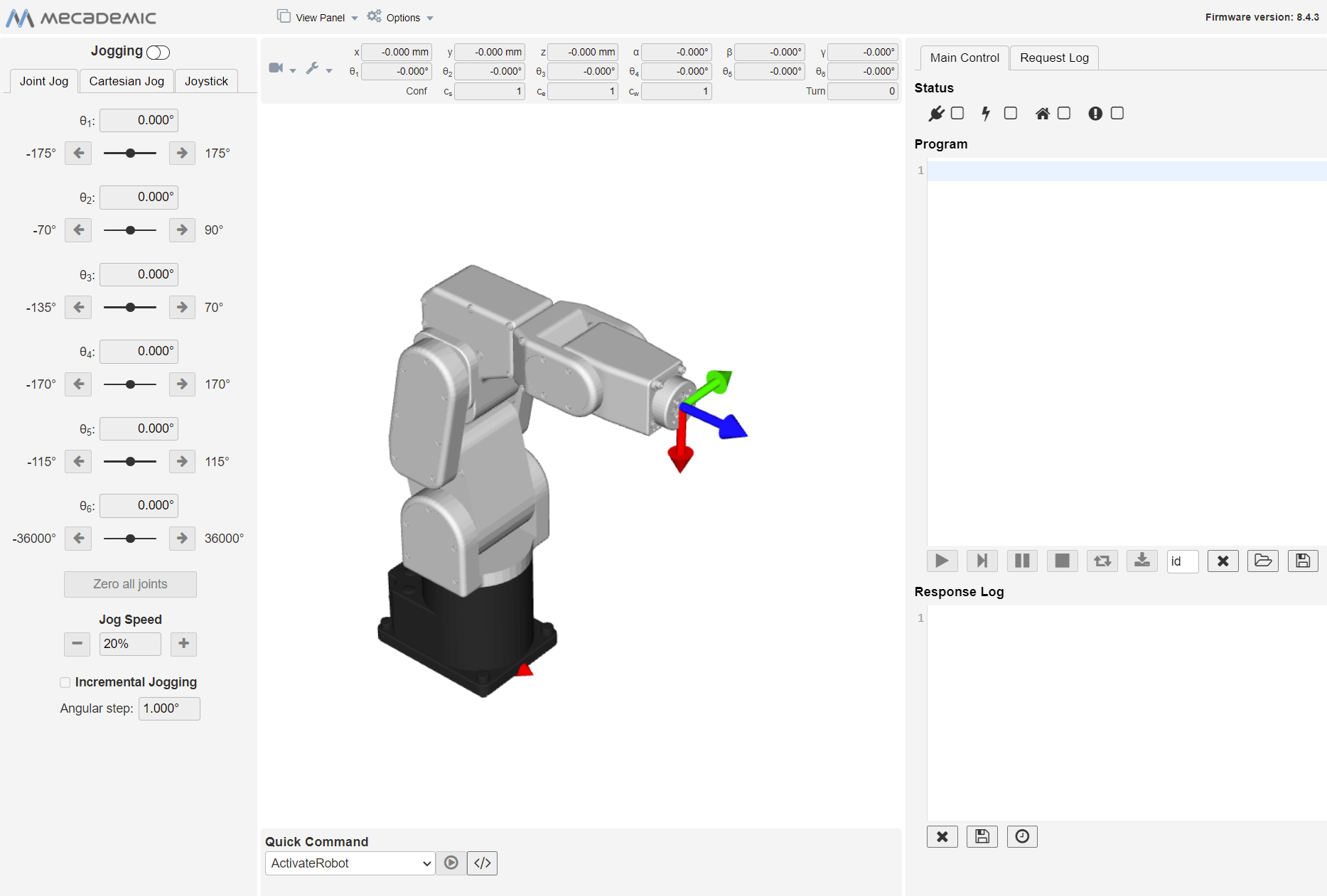
1.Abra la interfaz web de Mecademic en su navegador web (escriba la dirección IP del robot).
2.Copie y pegue el contenido del script en el editor de programas.
3.En la barra de estado, Conecte, Active e Inicie su robot.
4.Pulse el botón de reproducción para ejecutar el programa.
5.Pulse el botón de guardar para cargar el programa en el robot.
Cómo ejecutar un fichero PY
Puede generar un archivo Python que se conecte automáticamente al robot Mecademic utilizando la interfaz TCP/IP de Mecademic y ejecute el programa de forma remota.
Debe seleccionar el postprocesador llamado Mecademic Python. Los siguientes pasos resumen el procedimiento para ejecutar un archivo PY en el Mecademic.
1.Haga clic con el botón derecho del ratón en el programa y seleccione Seleccionar postprocesador
2.Seleccione Mecademic Python
3.Haga clic con el botón derecho del ratón en el programa y seleccione Generar programa robot (F6)
4.Guarde en disco el fichero PY generado.
5.Abra y ejecute el archivo PY en su IDE o ejecútelo directamente desde su entorno python.