Otros consejos
Esta sección proporciona otra información útil a la hora de programar los robots Mecademic Meca500.
Programas offline
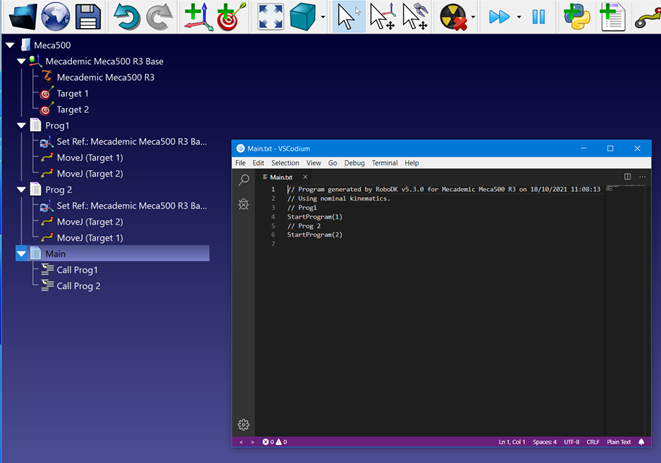
Los programas fuera de línea son persistentes en el robot y se pueden llamar utilizando su respectivo número de programa. Puede automatizar la selección del número de programa añadiéndolo al nombre del programa.
RoboDK recuperará automáticamente el ID y lo utilizará para llamar al programa. Esto también se aplica a las subrutinas, véase el ejemplo siguiente.
Unidades de velocidad
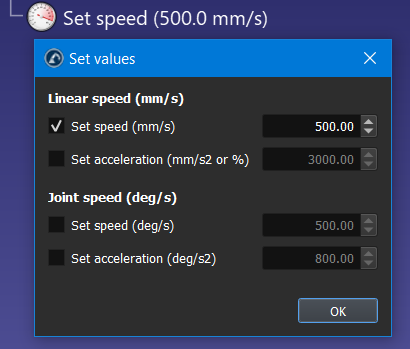
Las unidades de velocidad de articulación y aceleraciones lineales y de articulación para los robots Mecademic deben proporcionarse como un valor porcentual (%), al contrario que otras unidades mostradas en el menú de instrucciones de velocidad de ajuste.
La velocidad lineal es correcta y debe indicarse en mm/s.