Mecademic
Puede programar los robots Mecademic utilizando tres métodos diferentes: utilizando archivos de script Mecademic que se ejecutan en el controlador Mecademic, utilizando archivos PY que se ejecutan externamente o utilizando el controlador RoboDK.
1.Archivos de script: puede generar scripts que puedan cargarse en el controlador Mecademic utilizando RoboDK. Esto se consigue utilizando el postprocesador por defecto utilizado para los robots Mecademic. Puede copiar directamente los programas de script utilizando la interfaz web de Mecademic.
2.Archivos PY: Puede generar un archivo Python que se conecte automáticamente al robot Mecademic utilizando la interfaz TCP de Mecademic y ejecute el programa de forma remota. Debe seleccionar el postprocesador llamado Mecademic Python.
3.Programación en línea: RoboDK puede cargar su programa como un programa fuera de línea (hasta 500) en la memoria del robot. Estos programas offline pueden ser llamados desde cualquier otro método.
Con RoboDK puede generar programas offline, archivos de scripts y archivos PY que pueden ser ejecutados por un robot Mecademic. Además, es posible ejecutar programas en el robot desde RoboDK si el robot está conectado al ordenador.
Recuperar la IP del robot Mecademic
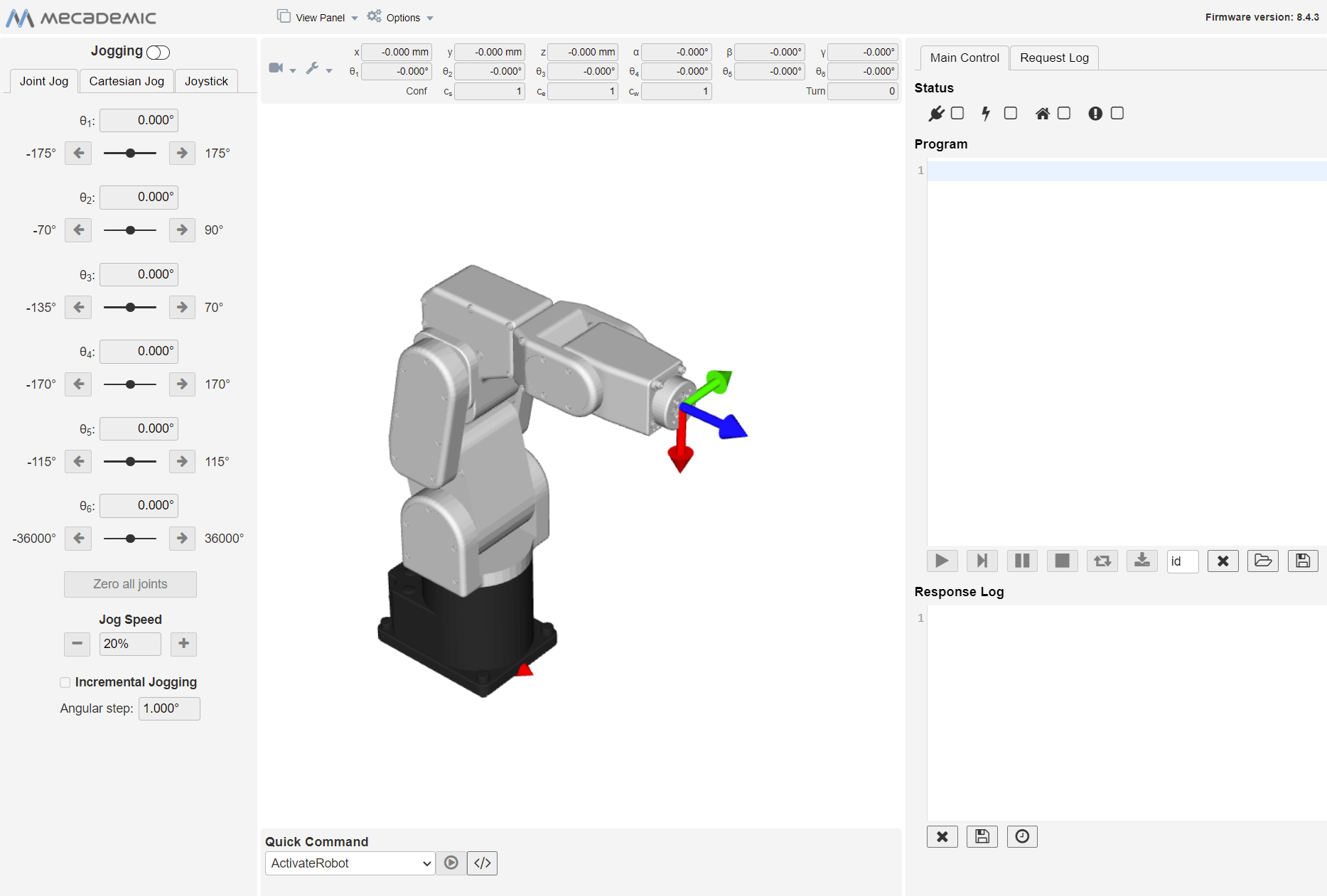
Necesita la IP de su robot Mecademic para ejecutar o transferir programas desde RoboDK. Los robots Mecademic utilizan la IP 192.168.0.100 por defecto. Puede asegurarse si la IP de su robot es correcta introduciendo la IP en un navegador para acceder a la interfaz web
Asegúrese de configurar correctamente una conexión de red si no puede ver la interfaz web del robot, como se muestra en la siguiente imagen.
Ejecutar un programa en el controlador Mecademic
vez que su simulación RoboDK esté lista, puede generar un programa offline que pueda ser ejecutado por el controlador del robot Mecademic (archivo script). También puede generar un archivo PY que ejecutará el programa en el controlador del robot desde un ordenador remoto.
Siga estos pasos para generar un programa fuera de línea (un script o un archivo PY) a partir de la simulación de su robot:
1.Haga clic con el botón derecho en un programa (Prog1 en este ejemplo)
2.Seleccione Generar programa robot F6
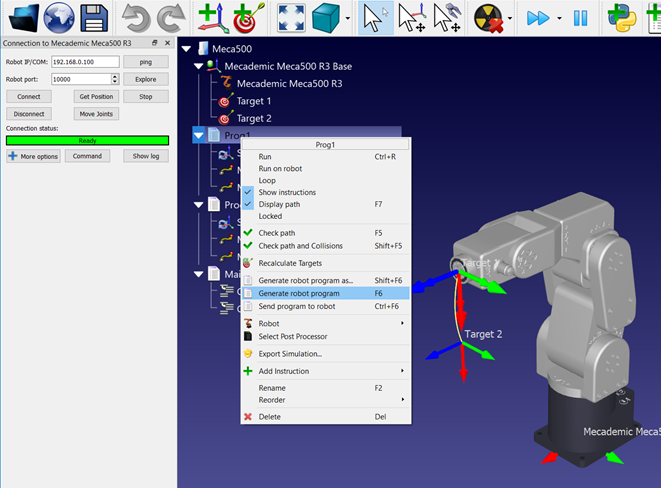
El programa se mostrará en un editor de texto (este comportamiento puede cambiarse en el menú: Herramientas➔ Opciones➔ Programa).
Cómo cargar un archivo script
Una vez que obtenga un archivo de programa/script puede ejecutar el programa o cargarlo en el controlador utilizando la interfaz web. Siga estos pasos para ejecutar el programa utilizando la interfaz web de Mecademic:
1.Abra la interfaz web de Mecademic en su navegador web (escriba la dirección IP del robot).
2.Copie y pegue el contenido del script en el editor de programas.
3.En la barra de estado, Conecte, Active e Inicie su robot.
4.Pulse el botón de reproducción para ejecutar el programa.
5.Pulse el botón de guardar para cargar el programa en el robot.
Cómo ejecutar un fichero PY
Puede generar un archivo Python que se conecte automáticamente al robot Mecademic utilizando la interfaz TCP/IP de Mecademic y ejecute el programa de forma remota.
Debe seleccionar el postprocesador llamado Mecademic Python. Los siguientes pasos resumen el procedimiento para ejecutar un archivo PY en el Mecademic.
1.Haga clic con el botón derecho del ratón en el programa y seleccione Seleccionar postprocesador
2.Seleccione Mecademic Python
3.Haga clic con el botón derecho del ratón en el programa y seleccione Generar programa robot (F6)
4.Guarde en disco el fichero PY generado.
5.Abra y ejecute el archivo PY en su IDE o ejecútelo directamente desde su entorno python.
Ejecutar programa desde RoboDK
Los controladores de robot proporcionan una alternativa a la programación fuera de línea (en la que se genera un programa y, a continuación, se transfiere al robot y se ejecuta). Puede ejecutar una simulación desde RoboDK directamente en el robot (Programación en línea). Encontrará más información en la sección Controladores de robot.
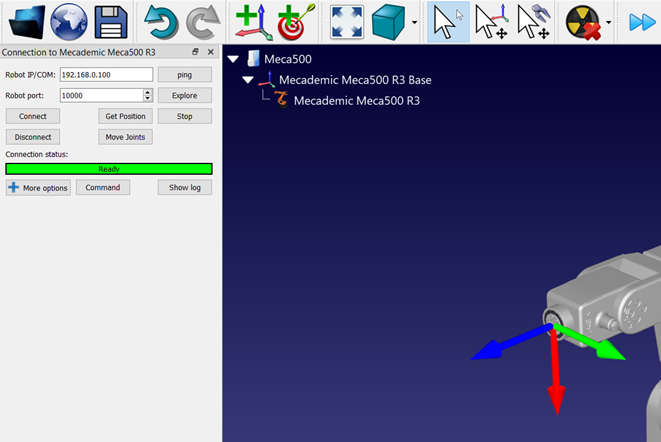
Siga estos pasos para conectarse al robot desde RoboDK:
1.Haga clic con el botón derecho en el robot en RoboDK
2.Seleccionar: 
3.Introduzca la IP del robot
4.Seleccione Conectar.
Debería aparecer un mensaje verde indicando Listo si la conexión ha tenido éxito.
El robot puede moverse seleccionando Obtener articulaciones del robot, Mover articulaciones, en el menú de conexión.
Existen dos métodos diferentes para ejecutar el programa desde el PC al robot:
1.Ejecutar en el robot paso a paso con retroalimentación en RoboDK (Programación en línea):
Este método utiliza el robot como servidor y cada instrucción se envía al robot paso a paso a medida que se ejecuta en el simulador. Este método es útil a efectos de depuración.
a.Haga clic con el botón derecho del ratón en el programa (Print3D en este ejemplo)
b.Seleccione Ejecutar en robot
c.Haga doble clic en el programa para iniciarlo (o haga clic con el botón derecho y seleccione Ejecutar)
Una vez marcada esta opción se conectará al robot real cada vez que hagamos doble clic en un programa (o clic con el botón derecho del ratón, y luego, seleccionar Ejecutar)
Estas operaciones también están disponibles en la API de RoboDK y permite integrar la programación de robots con otras aplicaciones. La API está disponible en Python y C# y otros lenguajes de programación.
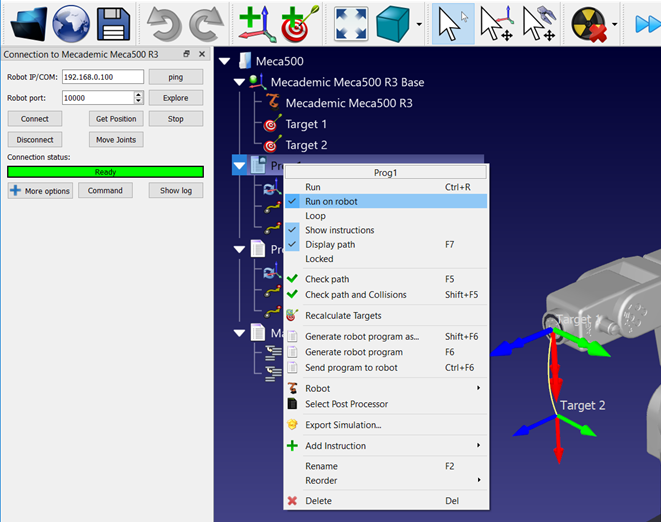
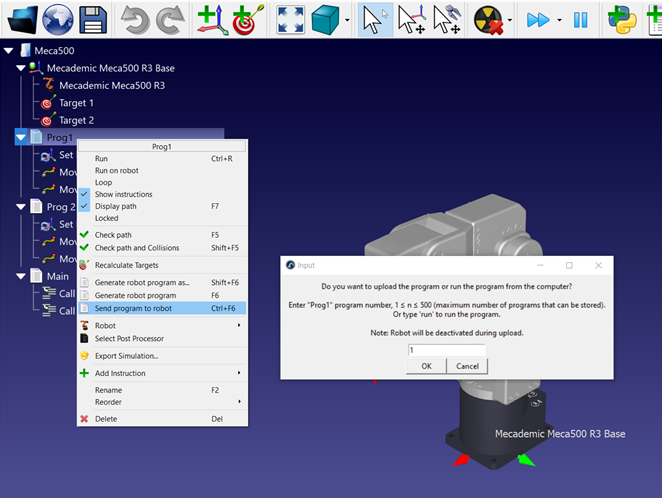
2.Envíe el programa al robot utilizando los post-procesadores de Mecademic. Puede utilizarse para ejecutar el programa en el robot especificando "ejecutar" como número de programa. El programa completo también puede guardarse en el controlador del robot como un programa fuera de línea (véase Programación fuera de línea del robot):
a.Haga clic con el botón derecho en el programa (Prog1 en este ejemplo)
b.Seleccione Enviar programa al robot (Ctrl+F6).
Otros consejos
Esta sección proporciona otra información útil a la hora de programar los robots Mecademic Meca500.
Programas offline
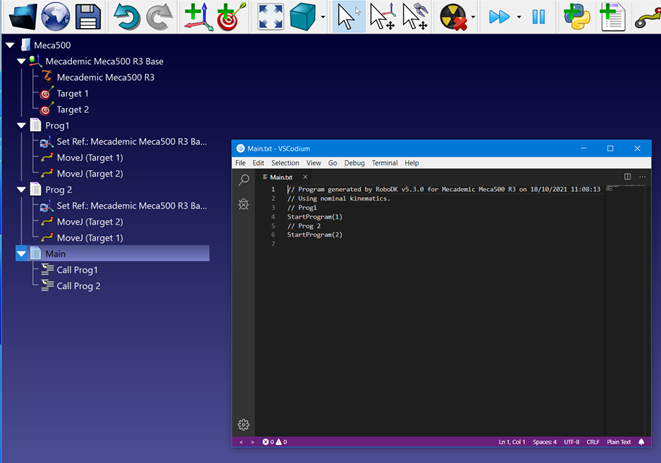
Los programas fuera de línea son persistentes en el robot y se pueden llamar utilizando su respectivo número de programa. Puede automatizar la selección del número de programa añadiéndolo al nombre del programa.
RoboDK recuperará automáticamente el ID y lo utilizará para llamar al programa. Esto también se aplica a las subrutinas, véase el ejemplo siguiente.
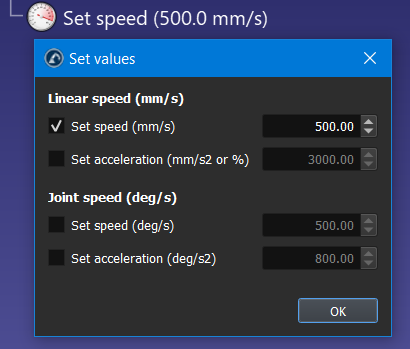
Unidades de velocidad
Las unidades de velocidad de articulación y aceleraciones lineales y de articulación para los robots Mecademic deben proporcionarse como un valor porcentual (%), al contrario que otras unidades mostradas en el menú de instrucciones de velocidad de ajuste.
La velocidad lineal es correcta y debe indicarse en mm/s.