Actualizar información de pulsos por grado
Los robots Motoman requieren los pulsos por grado para cada articulación para convertir los valores de pulso de articulación en valores angulares y viceversa. RoboDK automáticamente hace esta conversión si esta información se proporciona en los parámetros del robot. Para verificar si esta información es proporcionada o para actualizarla:
1.Haga doble click al robot en RoboDK
2.Seleccione Parámetros
3.Seleccione Desbloquear opciones avanzadas
4.Revise o actualice los valores de pulsos/grados para cada articulación
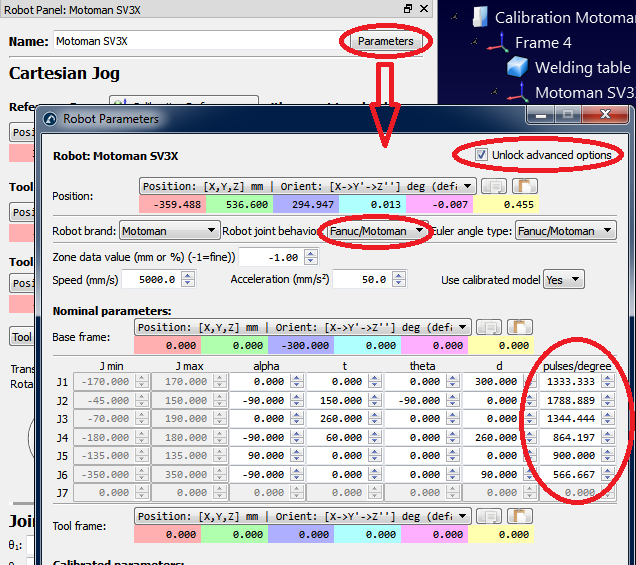
Además, es importante notar que algunos robots de Motoman tienen un acoplamiento entre las articulaciones 2 y 3. Esto significa que la articulación 3 se desplaza cuando se mueve la articulación 2. En este caso, el campo de comportamiento de la articulación del robot debe establecerse para Fanuc/Motoman.