Robots Yaskawa-Motoman
RoboDK soporta todos los controladores de robot de Yaskawa/Motoman desde SV3.
Las siguientes secciones demuestran las operaciones típicas usando un robot SV3 Teach pendant.
Controlador de RoboDK para Motoman
Los controladores de robots proporcionan una alternativa a la programación fuera de línea (donde es generado un programa, luego es transferido al robot y ejecutado). Con los controladores de robot, es posible ejecutar una simulación directamente en el robot (programación en línea). Más información disponible en la sección Controladores de robots.
Una conexión entre RoboDK y cualquier robot Motoman puede ser establecida para mover el robot automáticamente desde una PC conectada usando RoboDK y la opción de software Motoman’s MotoCom. Esto permite utilizar la opción Ejecutar en el robot de RoboDK para la programación en línea y la depuración. La conexión puede ser establecida a través de una conexión Ethernet estándar (TCP/IP) o una comunicación serial RS232.
Este paso es automático y no hay necesidad de configurar nada específico en el lado del robot.
Actualizar información de pulsos por grado
Los robots Motoman requieren los pulsos por grado para cada articulación para convertir los valores de pulso de articulación en valores angulares y viceversa. RoboDK automáticamente hace esta conversión si esta información se proporciona en los parámetros del robot. Para verificar si esta información es proporcionada o para actualizarla:
1.Haga doble click al robot en RoboDK
2.Seleccione Parámetros
3.Seleccione Desbloquear opciones avanzadas
4.Revise o actualice los valores de pulsos/grados para cada articulación
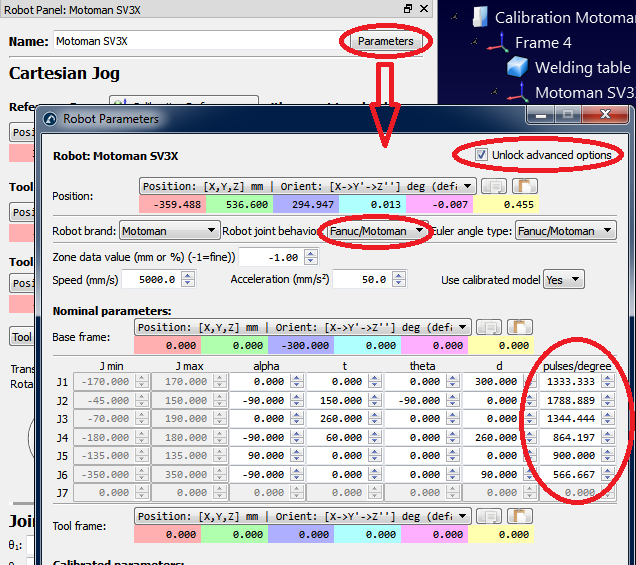
Además, es importante notar que algunos robots de Motoman tienen un acoplamiento entre las articulaciones 2 y 3. Esto significa que la articulación 3 se desplaza cuando se mueve la articulación 2. En este caso, el campo de comportamiento de la articulación del robot debe establecerse para Fanuc/Motoman.