Configurar nodo de escucha
Puede ejecutar programas en su robot Omron-TM directamente desde RoboDK utilizando el controlador RoboDK para Omron-TM. También puede generar programas como archivos de script que se transmiten mediante el protocolo TCP/IP. En ambos casos, debe asegurarse de que el robot se encuentra en un Nodo de Escucha. Esta sección describe cómo configurar la comunicación en RoboDK y en el robot Omron-TM.
Es posible seleccionar entre distintos postprocesadores o personalizar los postprocesadores para definir la forma en que se generan los programas fuera de línea y se ejecutan (por ejemplo, para dar soporte a una pinza o a sensores externos).
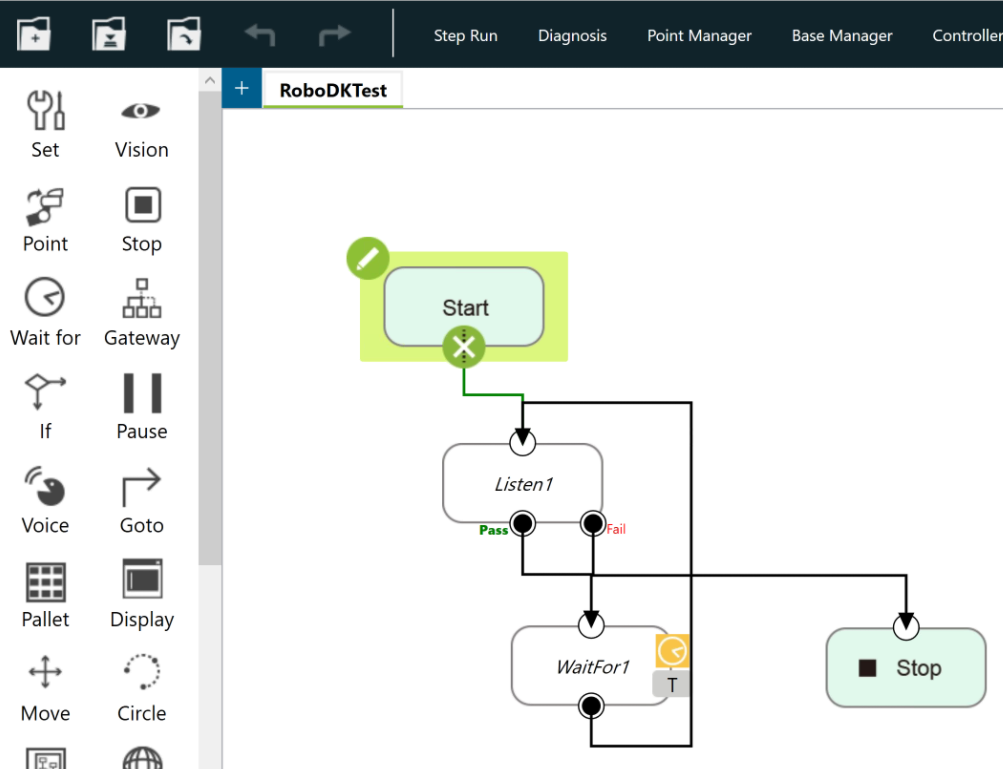
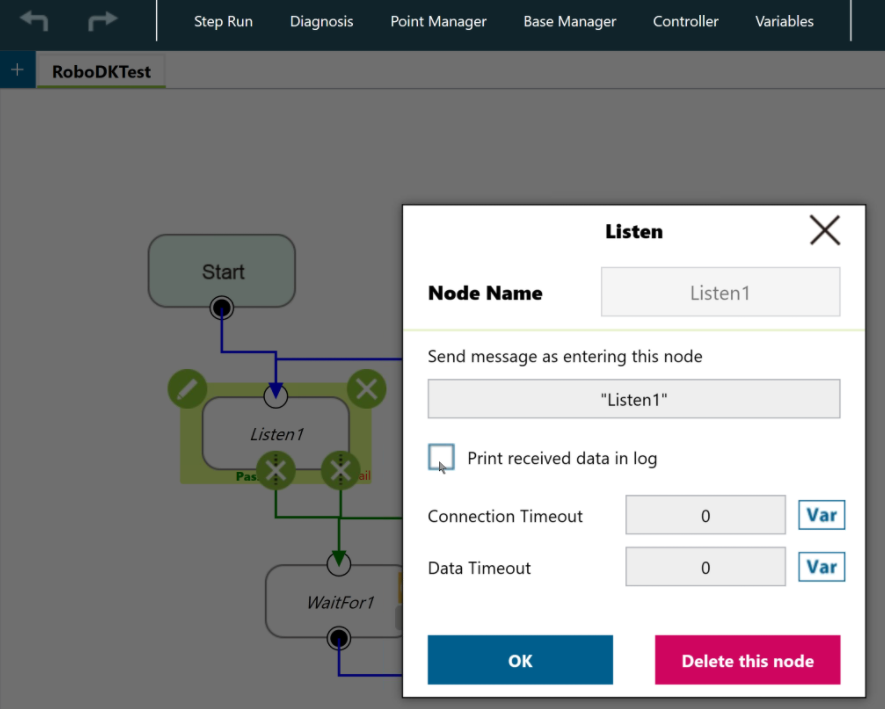
Para que el robot pueda moverse a distancia, es necesario que esté en modo Escucha. Esto se consigue utilizando un Nodo Escucha. La siguiente imagen muestra un flujo de trabajo de programa sugerido para tener un programa que ejecute automáticamente el programa enviado desde RoboDK. Se recomienda seleccionar Imprimir los datos recibidos en el registro para solucionar problemas.
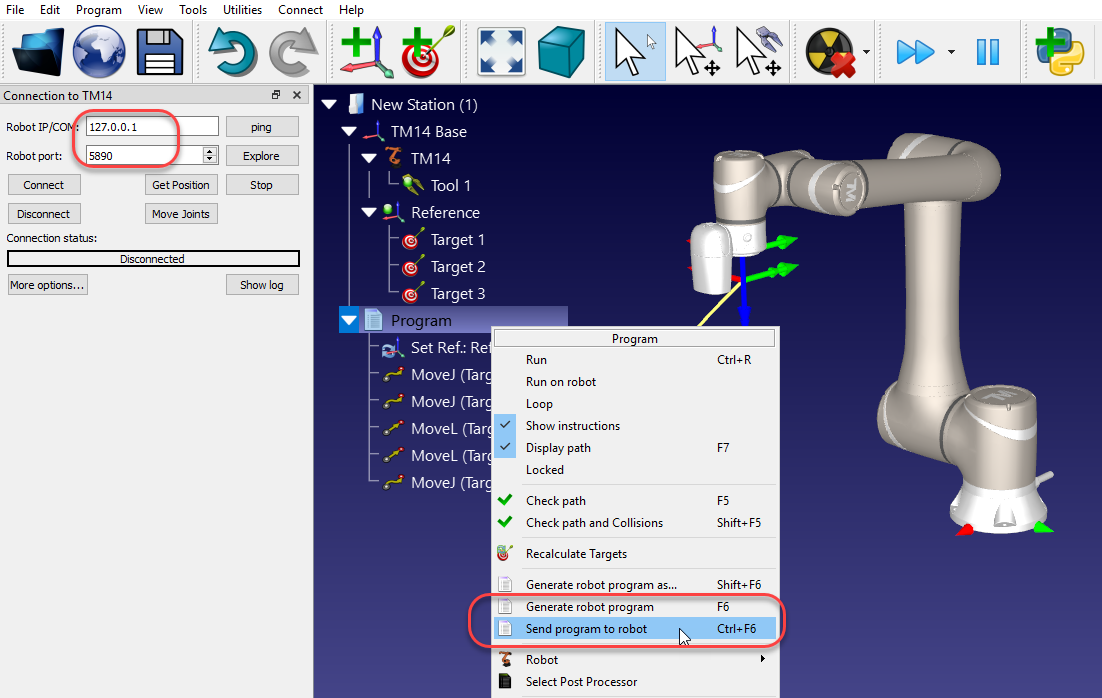
Siga estos pasos para configurar la comunicación en RoboDK y ejecutar un programa:
1.Seleccione Conectar➔ Conectar robot
2.Introduzca la IP del robot
3.Introduzca el puerto 5890
4.Haga clic con el botón derecho en su programa
5.Seleccione Generar programa robot F6.