Transfiera un archivo por USB
Utilizando el postprocesador predeterminado, obtendrá su programa como un archivo ZIP. Deberá preparar una unidad USB con las siguientes características para cargar correctamente el archivo en el robot:
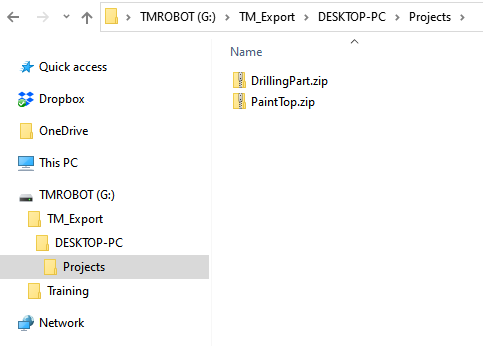
1.Nombre la unidad USB TMROBOT (este paso es importante).
2.Cree una nueva carpeta llamada TM_Export en la raíz de su disco.
3.Cree una nueva carpeta dentro de TM_Export con su proyecto (cualquier nombre debería funcionar).
4.Cree una nueva carpeta dentro de la carpeta anterior llamada Proyectos.
5.Coloque los programas ZIP dentro de la carpeta Proyectos.
Siga estos pasos para cargar el programa en TMFlow:
1.Guarde el archivo ZIP creado a partir de RoboDK en la unidad USB en la carpeta siguiendo los pasos anteriores.
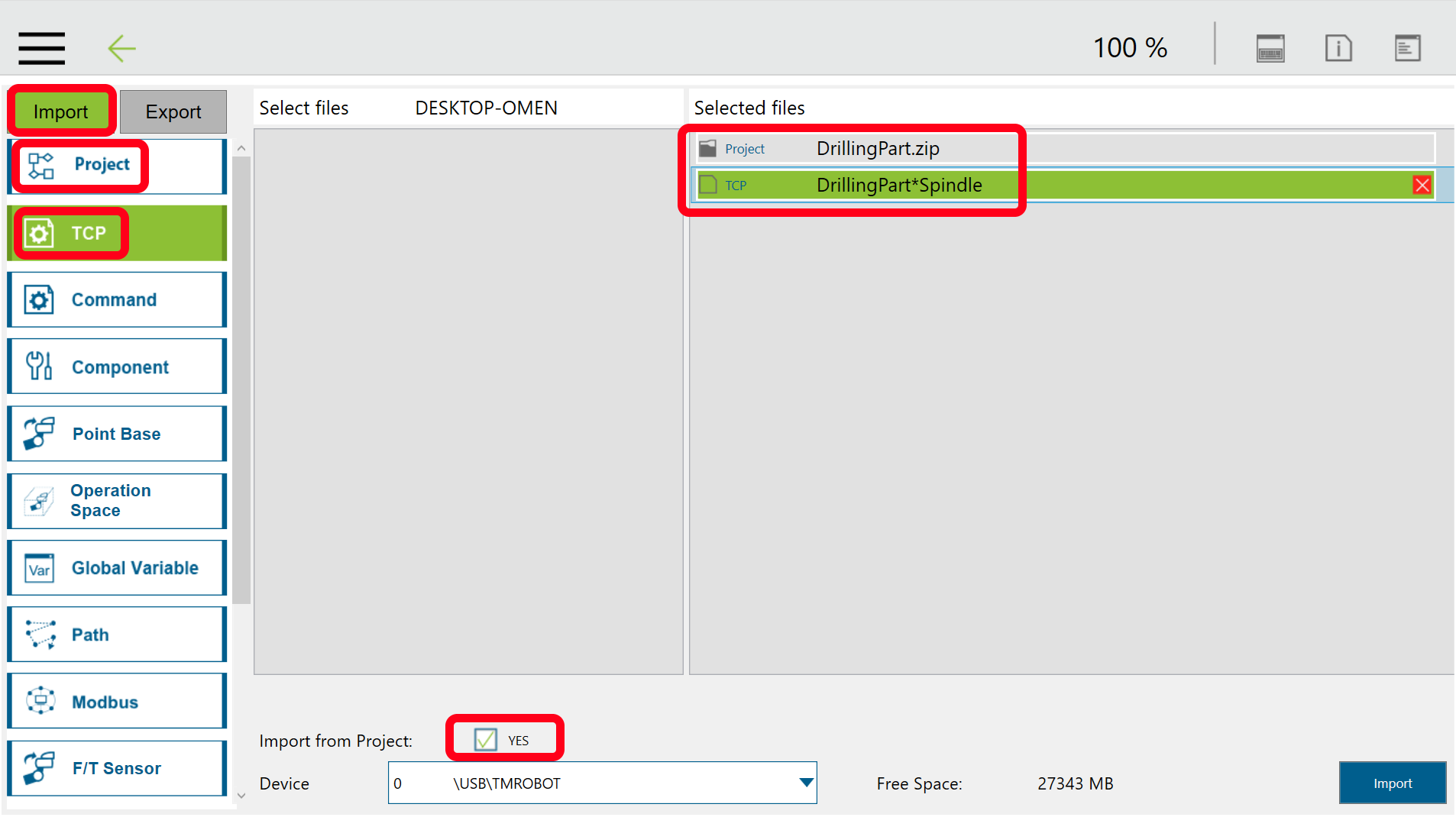
2.Seleccione el menú principal➔ Sistema➔ Importar/Exportar
3.Seleccione Importar y seleccione su carpeta en TM_Exportar
4.Seleccione Proyecto y elija su(s) programa(s) ZIP
5.Seleccione TCP
6.Marque la opción Importar desde el proyecto➔ Sí
7.Seleccione su programa y seleccione las herramientas de su programa para asegurarse de que las carga.
8.Seleccione Importar
Su programa estará ahora disponible cuando seleccione abrir nuevos programas.