Robots Omron-TM
Los robots Omron-TM pueden programarse sin conexión desde RoboDK utilizando archivos ZIP TMFlow. También puede utilizar el controlador del robot cuando éste se encuentre en un nodo de escucha para mover el robot directamente desde RoboDK en tiempo real.
Transfiera un archivo por USB
Utilizando el postprocesador predeterminado, obtendrá su programa como un archivo ZIP. Deberá preparar una unidad USB con las siguientes características para cargar correctamente el archivo en el robot:
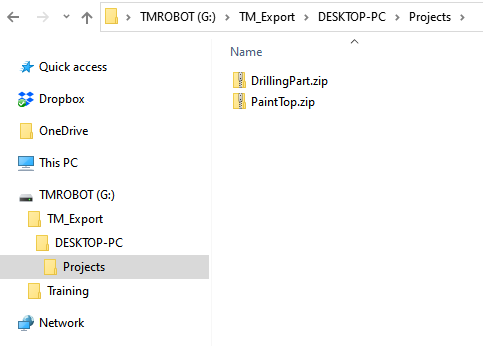
1.Nombre la unidad USB TMROBOT (este paso es importante).
2.Cree una nueva carpeta llamada TM_Export en la raíz de su disco.
3.Cree una nueva carpeta dentro de TM_Export con su proyecto (cualquier nombre debería funcionar).
4.Cree una nueva carpeta dentro de la carpeta anterior llamada Proyectos.
5.Coloque los programas ZIP dentro de la carpeta Proyectos.
Siga estos pasos para cargar el programa en TMFlow:
1.Guarde el archivo ZIP creado a partir de RoboDK en la unidad USB en la carpeta siguiendo los pasos anteriores.
2.Seleccione el menú principal➔ Sistema➔ Importar/Exportar
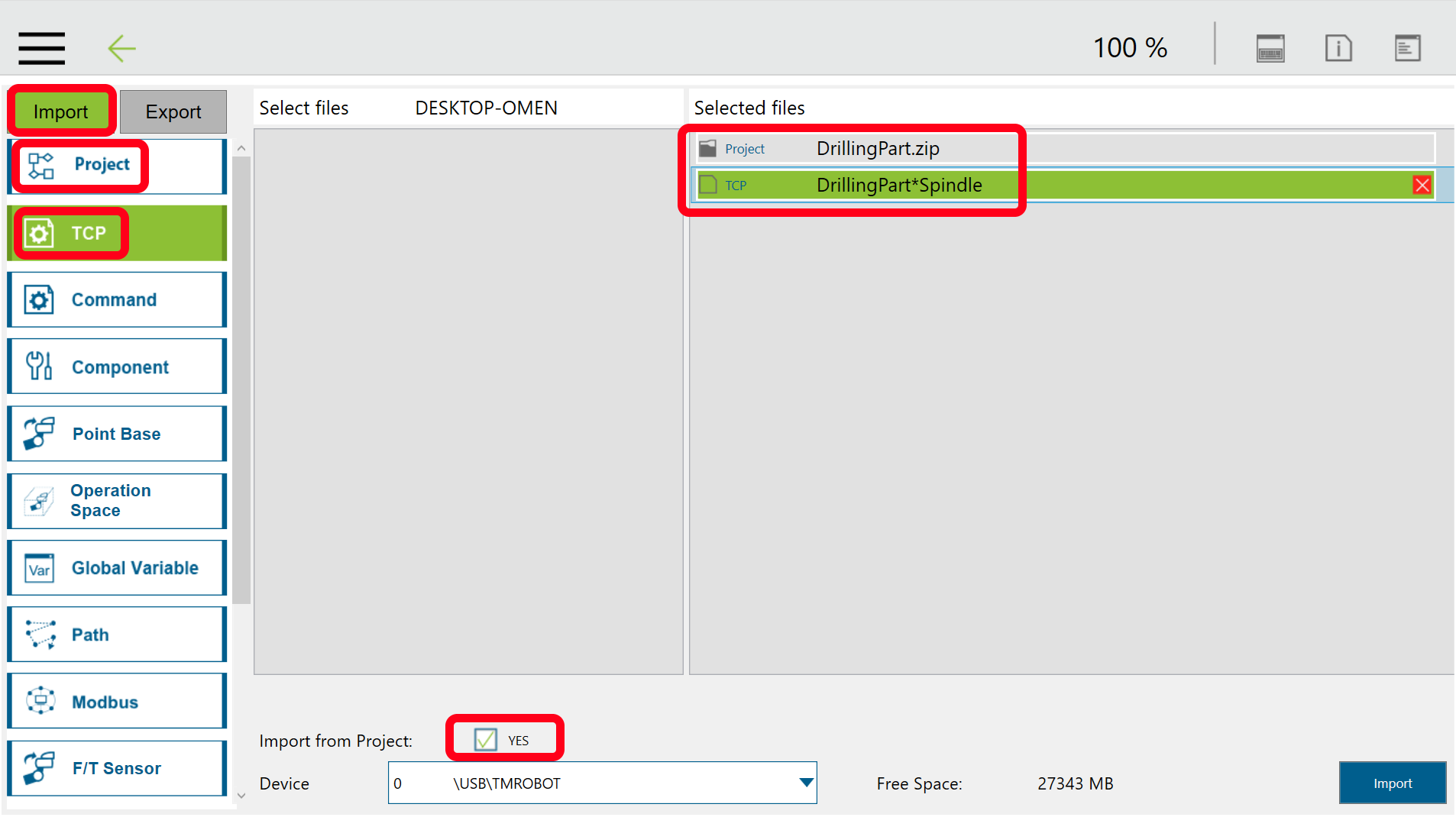
3.Seleccione Importar y seleccione su carpeta en TM_Exportar
4.Seleccione Proyecto y elija su(s) programa(s) ZIP
5.Seleccione TCP
6.Marque la opción Importar desde el proyecto➔ Sí
7.Seleccione su programa y seleccione las herramientas de su programa para asegurarse de que las carga.
8.Seleccione Importar
Su programa estará ahora disponible cuando seleccione abrir nuevos programas.
Configurar nodo de escucha
Puede ejecutar programas en su robot Omron-TM directamente desde RoboDK utilizando el controlador RoboDK para Omron-TM. También puede generar programas como archivos de script que se transmiten mediante el protocolo TCP/IP. En ambos casos, debe asegurarse de que el robot se encuentra en un Nodo de Escucha. Esta sección describe cómo configurar la comunicación en RoboDK y en el robot Omron-TM.
Es posible seleccionar entre distintos postprocesadores o personalizar los postprocesadores para definir la forma en que se generan los programas fuera de línea y se ejecutan (por ejemplo, para dar soporte a una pinza o a sensores externos).
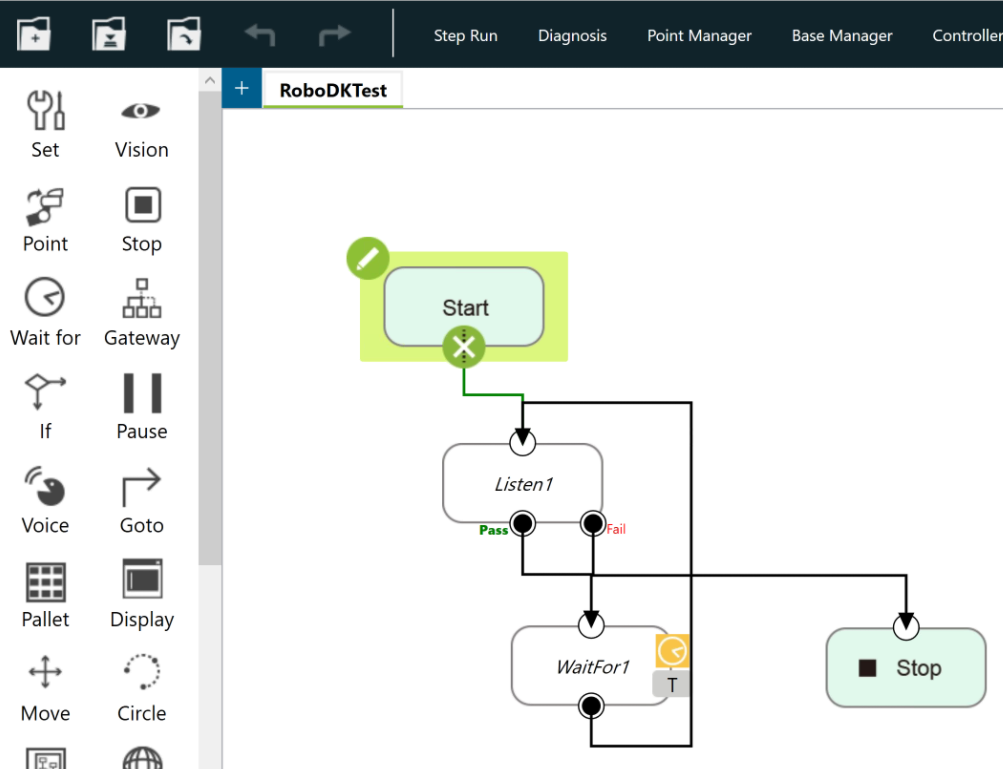
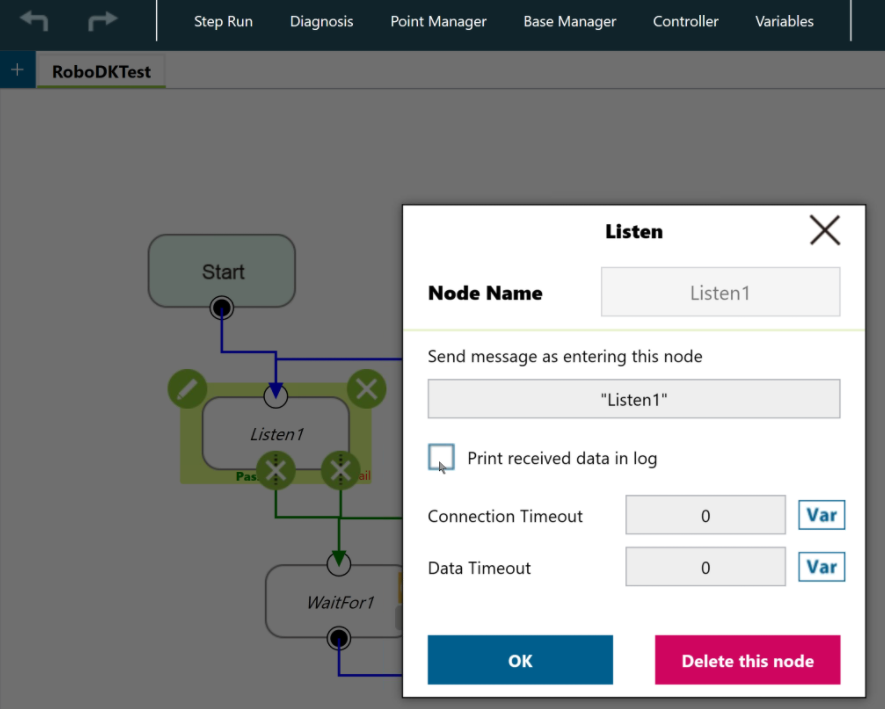
Para que el robot pueda moverse a distancia, es necesario que esté en modo Escucha. Esto se consigue utilizando un Nodo Escucha. La siguiente imagen muestra un flujo de trabajo de programa sugerido para tener un programa que ejecute automáticamente el programa enviado desde RoboDK. Se recomienda seleccionar Imprimir los datos recibidos en el registro para solucionar problemas.
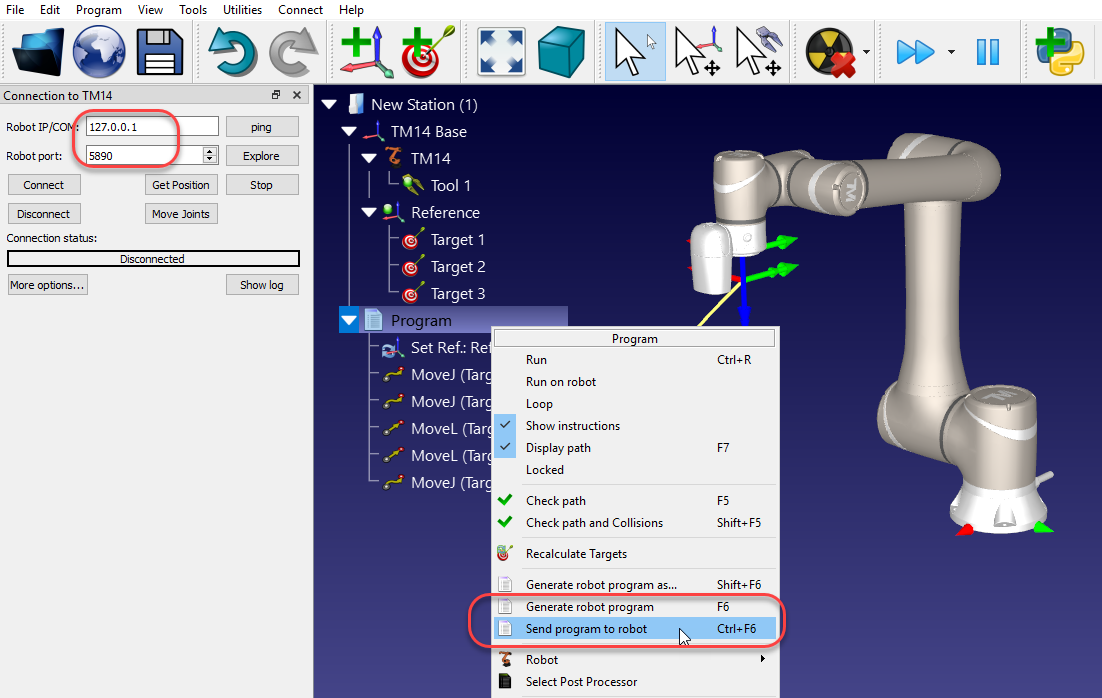
Siga estos pasos para configurar la comunicación en RoboDK y ejecutar un programa:
1.Seleccione Conectar➔ Conectar robot
2.Introduzca la IP del robot
3.Introduzca el puerto 5890
4.Haga clic con el botón derecho en su programa
5.Seleccione Generar programa robot F6.